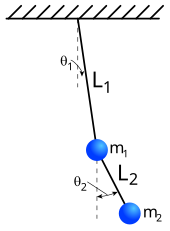
Можно рассматривать несколько вариантов двойных маятников: два звена могут быть одинаковыми или иметь разную длину и вес; они могут быть простыми маятниками или физическими маятниками; движение может происходить в трёх измерениях или быть ограничено вертикальной плоскостью. В следующем анализе звенья избраны как одинаковые физические маятники длины и массы , и их движение ограничено двумя измерениями.
У физического маятника масса распределена вдоль всей его длины. Если масса распределена равномерно, тогда центр масс каждого звена совпадает с его геометрическим центром, и звено имеет такой момент инерции относительно этой точки.
Удобно использовать углы между каждым звеном и вертикалью как обобщённые координаты, определяя пространство конфигураций системы. Если положить начало координат декартовой системы координат в точке подвешивания первого маятника, тогда центр масс этого маятника находится в:
и центр масс другого в
Этой информации достаточно для того чтобы записать Лагранжиан.
Первое слагаемое это линейная кинетическая энергия центра масс тел, второе слагаемое это вращательная кинетическая энергия центров масс каждого из стержней. Последнее слагаемое это потенциальная энергия тел в однородном гравитационном поле.
Подставив координаты и перегруппируя уравнения имеем
Движение двойного физического маятника (из численного интегрирования уравнения движения) Траектории двойного маятника При большой выдержке, двойной маятник проявляет хаотическое движение (отслежен с помощью светодиодов)
Последние четыре уравнения являются явными формулами для временной эволюций системы с заданным текущим состоянием. Невозможно продвинуться дальше и интегрировать эти уравнения аналитически, чтобы получить формулы для θ1 и θ2 как функции от времени. Однако возможно выполнить численное интегрирование, используя метод Рунге — Кутты или подобную технику.
Примечания
↑Levien RB and Tan SM. Double Pendulum : An experiment in chaos.American Journal of Physics 1993; 61 (11) : 1038
Похожие исследовательские статьи
Математи́ческий ма́ятник — осциллятор, представляющий собой механическую систему, состоящую из материальной точки на конце невесомой нерастяжимой нити или лёгкого стержня и находящуюся в однородном поле сил тяготения. Другой конец нити (стержня) обычно неподвижен. Период малых собственных колебаний маятника длины L, подвешенного в поле тяжести, равен
Лемниска́та Берну́лли — плоская алгебраическая кривая. Определяется как геометрическое место точек, произведение расстояний от которых до двух заданных точек (фокусов) постоянно и равно квадрату половины расстояния между фокусами.
Гипе́рбола — геометрическое место точек M евклидовой плоскости, для которых абсолютное значение разности расстояний от M до двух выделенных точек и постоянно. Точнее,
причём
Зако́ны Ке́плера — три эмпирических соотношения, установленные Иоганном Кеплером на основе длительных астрономических наблюдений Тихо Браге. Изложены Кеплером в работах, опубликованных между 1609 и 1619 годами. Описывают идеализированную гелиоцентрическую орбиту планеты.
Эпицикло́ида — плоская кривая, образуемая фиксированной точкой окружности, катящейся по внешней стороне другой окружности без скольжения.
Класс трёхмерных параметрических поверхностей определяется функцией , зависящей от параметров и отображающей некоторое связное множество из n-мерного пространства в трёхмерное пространство таким образом, что это отображение является поверхностью. Эта функция задаёт класс поверхностей, а набор параметров — конкретную поверхность из этого класса.
Лагранжева механика — формулировка классической механики, введённая Луи Лагранжем в 1788 году. В лагранжевой механике траектория объекта получается при помощи отыскания пути, который минимизирует действие — интеграл от функции Лагранжа по времени. Функция Лагранжа для классической механики вводится в виде разности между кинетической энергией и потенциальной энергией.
Пряма́я — одно из фундаментальных понятий евклидовой геометрии. При систематическом изложении геометрии прямые линии обычно принимаются за одно из исходных (неопределяемых) понятий, их свойства и связь с другими понятиями определяются аксиомами геометрии.
Пространство состояний — в теории управления один из основных методов описания поведения динамической системы. Движение системы в пространстве состояний отражает изменение её состояний.
Полярная система координат — двумерная система координат, в которой каждая точка на плоскости определяется двумя числами — полярным углом и полярным радиусом. Полярная система координат особенно полезна в случаях, когда отношения между точками проще изобразить в виде радиусов и углов; в более распространённой декартовой, или прямоугольной, системе координат, такие отношения можно установить только путём применения тригонометрических уравнений.
Сферическая система координат — трёхмерная система координат, в которой каждая точка пространства определяется тремя числами , где — расстояние до начала координат, а и — зенитный и азимутальный углы соответственно.
Цилиндрической системой координат называют трёхмерную систему координат, являющуюся расширением полярной системы координат путём добавления третьей координаты, которая задаёт высоту точки над плоскостью.
Якобиа́н — определённое обобщение производной функции одной переменной на случай отображений из евклидова пространства в себя.
Криволине́йная систе́ма координа́т, или криволине́йные координа́ты, — система координат в евклидовом (аффинном) пространстве, или в области, содержащейся в нём. Криволинейные координаты не противопоставляются прямолинейным, последние являются частным случаем первых. Применяются обычно на плоскости (n=2) и в пространстве (n=3); число координат равно размерности пространства n. Наиболее известным примером криволинейной системы координат являются полярные координаты на плоскости.
Сферические функции представляют собой угловую часть семейства ортогональных решений уравнения Лапласа, записанную в сферических координатах. Они широко используются для изучения физических явлений в пространственных областях, ограниченных сферическими поверхностями и при решении физических задач, обладающих сферической симметрией. Сферические функции имеют большое значение в теории дифференциальных уравнений в частных производных и теоретической физике, в частности в задачах расчёта электронных орбиталей в атоме, гравитационного поля геоида, магнитного поля планет и интенсивности реликтового излучения.
Суперэллипс — геометрическая кривая, задаваемая в декартовых координатах уравнением
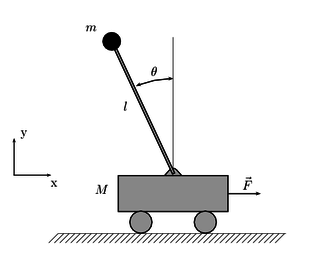
Перевёрнутый маятник — устройство, представляющее собой маятник, который имеет центр масс выше своей точки опоры, закреплённый на конце жёсткого стержня. Часто точка опоры закрепляется на тележке, которая может перемещаться по горизонтали. В то время как нормальный маятник устойчиво висит вниз, обратный маятник по своей природе неустойчивый и должен постоянно балансироваться чтобы оставаться в вертикальном положении, с помощью применения крутящего момента к опорной точке или при перемещении точки опоры по горизонтали, как части обратной связи системы. Простейшим демонстрационным примером может являться балансировка карандаша на конце пальца.
Обобщённые координаты — переменные состояния системы, описывающие конфигурацию динамической системы относительно некоторой эталонной конфигурации в аналитической механике, а конкретно исследовании динамики твёрдых тел в системе многих тел. Эти переменные должны однозначно определять конфигурацию системы относительно эталонной конфигурации. Обобщённые скорости — производные по времени обобщённых координат системы.
Векторными сферическими гармониками являются векторные функции, преобразующиеся при вращениях системы координат так же, как скалярные сферические функции с теми же индексами, или определенные линейные комбинации таких функций.
Диполя́рная, или дипо́льная, систе́ма координа́т — трёхмерная криволинейная ортогональная система координат, основанная на точечном (центральном) диполе, точнее, на его инвариантах преобразования координат.
Эта страница основана на статье Википедии. Текст доступен на условиях лицензии CC BY-SA 4.0; могут применяться дополнительные условия. Изображения, видео и звуки доступны по их собственным лицензиям.







![{\displaystyle L={\frac {1}{6}}m\ell ^{2}\left[{{\dot {\theta }}_{2}}^{2}+4{{\dot {\theta }}_{1}}^{2}+3{{\dot {\theta }}_{1}}{{\dot {\theta }}_{2}}\cos(\theta _{1}-\theta _{2})\right]+{\frac {1}{2}}mg\ell \left(3\cos \theta _{1}+\cos \theta _{2}\right).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7d14b350125f019086ff096c143b2e629beba08c)


![{\displaystyle {\begin{cases}p_{\theta _{1}}\equiv {\frac {\partial L}{\partial {{\dot {\theta }}_{1}}}}={\frac {1}{6}}m\ell ^{2}\left[8{{\dot {\theta }}_{1}}+3{{\dot {\theta }}_{2}}\cos(\theta _{1}-\theta _{2})\right]\\\\p_{\theta _{2}}\equiv {\frac {\partial L}{\partial {{\dot {\theta }}_{2}}}}={\frac {1}{6}}m\ell ^{2}\left[2{{\dot {\theta }}_{2}}+3{{\dot {\theta }}_{1}}\cos(\theta _{1}-\theta _{2})\right].\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52765bcbdadf3bdf7c1f84cf6d92f8d21706ada7)

![{\displaystyle {\begin{cases}{{\dot {p}}_{\theta _{1}}}={\frac {\partial L}{\partial \theta _{1}}}=-{\frac {1}{2}}m\ell ^{2}\left[{{\dot {\theta }}_{1}}{{\dot {\theta }}_{2}}\sin(\theta _{1}-\theta _{2})+3{\frac {g}{\ell }}\sin \theta _{1}\right]\\\\{{\dot {p}}_{\theta _{2}}}={\frac {\partial L}{\partial \theta _{2}}}=-{\frac {1}{2}}m\ell ^{2}\left[-{{\dot {\theta }}_{1}}{{\dot {\theta }}_{2}}\sin(\theta _{1}-\theta _{2})+{\frac {g}{\ell }}\sin \theta _{2}\right].\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/22edbb41a45648c06990e2c2d7de224dc8f9e19a)