Кибернетическая физика
Кибернетическая физика — область науки на стыке кибернетики и физики, изучающая физические системы кибернетическими методами. Часть молекулярной физики тоже входит в Кибернетику[]. Под кибернетическими методами понимаются методы решения задач управления, оценивания переменных и параметров (идентификации), адаптации, фильтрации, оптимизации, передачи сигналов, распознавания образов и др., развитые в рамках кибернетики. Физические системы также обычно понимаются широко: как системы живой и неживой природы или искусственно созданные (то есть, возможно, биологические, химические и т. д.), физика которых достаточно изучена и имеются математические модели, пригодные для постановки кибернетических задач. Целью исследования в кибернетической физике является анализ возможности преобразования свойств системы с помощью подачи внешних воздействий того или иного класса и определение вида воздействий, требуемых для данного преобразования. Типичными классами воздействий являются функции, постоянные во времени (в задачах выбора параметров, анализа бифуркаций и др.); функции, зависящие только от времени, например, периодические (в задачах вибрационной механики, программного управления); функции, значение которых в каждый момент времени зависит от результатов измерения наблюдаемых переменных (выходов) системы в тот же или предыдущие моменты времени. Последний случай наиболее интересен и соответствует изучению возможных последствий введения в систему внешних обратных связей.
Корни кибернетической физики
До 1990 года кибернетические термины редко появлялись на страницах ведущих физических журналов, а влияние кибернетики на физические исследования было практически не ощутимо. Следует отметить, что хотя автоматические и автоматизированные системы измерений и управления давно и широко применяются в экспериментальных физических исследованиях, а современный физический эксперимент немыслим без автоматики, в экспериментальных исследованиях система управления обычно играет вспомогательную роль, обеспечивая поддержание заранее заданного режима эксперимента. При этом не возникает качественно нового взаимодействия физики и теории управления, когда при применении кибернетических методов обнаруживаются новые теоретические результаты и качественно новые физические эффекты. Ситуация коренным образом изменилась в 1990-х годах с началом бурного развития двух новых областей: управление хаосом и управление квантовыми системами.
Управление хаосом
Показательна история управления хаосом. До 1990 года в научных журналах работ в этой области почти не было. Однако в 1990 г. появилась статья группы ученых из Мэрилендского университета, США Э.Отта, Ч.Гребоджи и Дж. Йорке «Управление хаосом»[1]. Статья вызвала настоящий взрыв публикаций: по данным Web of Science, в начале 2000-х годов по этой тематике публиковалось более чем по 400 статей в год в рецензируемых журналах, а общее число публикаций перевалило за 3000.
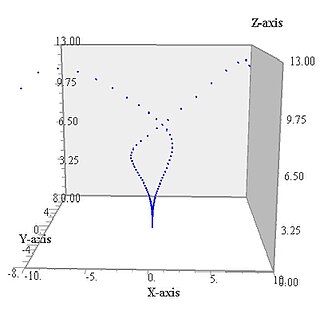
В статье Отта-Гребоджи-Йорке был сделан вывод, что даже малое управление в виде обратной связи, приложенное к нелинейной (хаотически колеблющейся) системе, может коренным образом изменить её динамику и свойства: — например, превратить хаотическое движение в периодическое. Работа[1] породила лавину публикаций, в которых иногда экспериментальным путём, а чаще путём компьютерного моделирования, демонстрировалось, как управление (с обратной связью или без неё) может влиять на поведение разнообразных реальных и модельных физических систем. Предложенный в работе метод управления стали называть методом OGY по начальным буквам фамилий авторов, а число ссылок на работу к 2002 г. превысило 1300.
Интересно, что за пять лет до работы[1] появились статьи[2][3], в которых задача подавления хаоса в нелинейной системе подачей периодического управляющего воздействия была поставлена, а возможность её решения продемонстрирована путём компьютерного моделирования на примере экологической системы. Еще раньше было обнаружено превращение хаотического процесса в системе Лоренца в периодический под действием гармонического возбуждения[4]. Однако, хотя статьи[2][4] и были переведены и опубликованы на английском языке, лавины публикаций они не породили.
Впоследствии были предложены и другие методы преобразования хаотических движений в периодические, например, метод запаздывающей обратной связи (метод Пирагаса)[5]. Применялись также многочисленные существующие методы нелинейного и адаптивного управления. Подробнее см.[6][7].
Большинство публикаций по этой теме печатается в физических журналах, а авторы большинства работ представляют физические факультеты и кафедры. Таким образом, новое направление с достаточным основанием можно отнести к сфере физики. Развитие методов управления хаотическими процессами стимулировалось новыми приложениями в лазерных и химических технологиях, в технике телекоммуникаций, в биологии и медицине.
Управление квантовыми системами
Бурный рост претерпела за последнее десятилетие XX века область управления молекулярными и квантовыми системами. Пожалуй, именно в эту область идеи управления проникли раньше всего — вспомним алхимиков, искавших способы вмешательства в ход химических реакций в стремлении превратить свинец и ртуть в золото. Следующую веху установил английский физик Джеймс Клерк Максвелл, придумавший в 1871 г. гипотетическое существо (названное лордом Кельвином демоном Максвелла), способное измерять скорости отдельных молекул газа в сосуде и направлять быстрые молекулы в одну часть сосуда, а более медленные молекулы — в другую, то есть управлять молекулами по принципу обратной связи. В недавних публикациях всерьез обсуждаются вопросы экспериментальной реализации демона Максвелла[8]. Примечательно, что перу Максвелла принадлежит также одна из основополагающих статей по теории управления[9]
В конце 1970-х годов появились первые математические постановки и решения задач управления квантовыми системами на основе методов теории управления, в частности, были установлены критерии управляемости квантовых систем[10] В 1980-х — 1990-х годах успехи лазерной техники привели к появлению лазеров, позволяющих генерировать импульсы когерентного излучения продолжительностью порядка фемтосекунд (1 фс = с). Продолжительность фемтосекундного импульса сравнима с периодом собственных колебаний молекул, что в принципе делает фемтосекундный лазер средством управления поведением отдельных атомов и молекул. Возникло новое направление в химии — фемтохимия, за успехи в котором в 1999 г. была присуждена Нобелевская премия по химии А.Зивейлю.

С развитием других способов использования фемтосекундных лазеров возник термин фемтосекундные технологии, или фемтотехнологии. Развитие новых технологий стимулировало бурный рост исследований по когерентному управлению молекулярными системами как на основе классических, так и на основе квантовых моделей. Число публикаций в рецензируемых журналах только по управлению квантовыми системами превысило 600 статей в год. Использование методов теории управления открывает новые горизонты в изучении и изменении движения атомов и молекул, определяя как способы, так и возможные границы вмешательства в интимные природные процессы микромира.
Вибрационная механика
Несколько других направлений в механике и физике посвящены изучению изменений свойств систем при подаче на них воздействий определенного класса. В некоторых из них методы кибернетики и теории управления применяются явно, другие близки кибернетической физике лишь идейно. К последним относится «вибрационная механика». В 1940-х годах академик, впоследствии лауреат Нобелевской премии по физике П. Л. Капица провел эксперимент, демонстрирующий, что верхнее, неустойчивое положение равновесия маятника становится устойчивым, если ось подвеса маятника вибрирует в вертикальном направлении с достаточно большой частотой. Этот эксперимент был объяснен П. Л. Капицей на основе введения так называемого эффективного потенциала, что соответствует варианту метода усреднения[11]. Работа П. Л. Капицы дала толчок к развитию нового раздела механики — вибрационной механики. В работах И. И. Блехмана и его коллег был развит общий подход к изучению действия вибрации на механические системы[12]. Метод П. Л. Капицы применялся также для исследования колебательных процессов в атомной физике, физике плазмы и др. С кибернетической точки зрения суть перечисленных работ состоит в анализе свойств систем, управляемых высокочастотными сигналами без обратной связи. Подобные системы имеют применения в случаях, когда измерение наблюдаемых переменных системы невозможно или нецелесообразно.
Оптимизационная термодинамика
Основы классической термодинамики были заложены в 1724 году Сади Карно, который установил правило ведения процесса, обеспечивающее наибольшую эффективность тепловой машины (Цикл Карно). Для машины, извлекающей тепло из источника, находящегося в тепловом равновесии при температуре , и производящей полезную работу при помощи теплообмена с резервуаром, находящимся при температуре , максимальный КПД равен Оценки КПД Карно для тепловой машины, как и другие оценки классической термодинамики (обратимая работа разделения смеси идеальных газов и идеальных растворов и пр.) справедливы для процессов, в которых диссипация отсутствует, что в свою очередь, предполагает либо неограниченную продолжительность процесса, либо сколь угодно большие коэффициенты тепло и массопереноса (косвенно они характеризуют размеры аппарата). В конце 1950-х годов возникло направление необратимой термодинамики, изучавшее предельные возможности разного рода систем при ограниченной продолжительности процессов, либо заданной средней интенсивности потоков. Оно получило название «Термодинамика при конечном времени» или «Оптимизационная термодинамика».



В 1957 г. в работе И. И. Новикова[13] и, независимо, в работе Ф. Л. Курзона и В.Альборна[14] в 1975 году были найдены параметры цикла предельной мощности тепловой машины и показано, что его максимальный КПД равен (формула Новикова-Курзона-Альборна). Отметим, что задача ставится и решается как оптимизационная, а в более сложных случаях для поиска предельных характеристик термодинамических систем с успехом используются современные методы теории оптимального управления. Таким образом и в этой области кибернетические методы используются для получения новых физических результатов. О современном состоянии оптимизационной термодинамики можно узнать из книг[15][16].

Предмет и методология кибернетической физики
К концу 1990-х годов стало ясно, что уже фактически сформировалась новая область на стыке физики и теории управления, в которой физические исследования проводятся с привлечением идей и методов теории управления (кибернетики). Термин кибернетическая физика, был предложен, по-видимому, в[][17][18], а в[][19][20][21], систематически представлены предмет и методология новой области.
Чтобы охарактеризовать предмет кибернетической физики, следует описать классы рассматриваемых моделей объектов управления (ОУ), целей управления (ЦУ) и допустимых алгоритмов управления, а чтобы охарактеризовать её методологию, необходимо описать основные методы построения алгоритмов управления и типы получаемых результатов.
Формальная постановка любой задачи управления начинается с выбора модели динамики управляемой системы (объекта управления — ОУ) и модели цели управления. Даже если модель ОУ не дана или неизвестна, она должна быть определена в том или ином виде. Отличие кибернетических моделей от традиционных для физики и механики моделей динамики состоит в том, что в них явно указываются входы и выходы системы, поскольку это существенно при построении внешних обратных связей. В литературе по управлению физическими системами рассматривается несколько классов моделей ОУ: модели с сосредоточенными параметрами, описываемые обыкновенными дифференциальными уравнениями в пространстве состояний, модели с распределенными параметрами, описываемые уравнениями в частных производных, дискретные модели, описываемые разностными уравнениями.
Основными типами целей управления являются:
Регулирование (часто называемое также стабилизацией или позиционированием) — приведение вектора переменных состояния объекта (или вектора выходных переменных ) к некоторому равновесному состоянию (соответственно, ).




Слежение. В задачах слежения (называемых также задачами программного управления) требуется приблизить вектор переменных состояния ОУ к желаемой функции времени или вектор выхода ) к желаемой функции времени . Сложность достижения целей возрастает, если желаемое состояние равновесия или траектория неустойчивы при отсутствии управления. Такой случай типичен для задач управления хаотическими системами.


Возбуждение (раскачка, раскрутка, разгон) колебаний. В задачах возбуждения колебаний предполагается, что первоначально система находится в состоянии покоя и необходимо привести её в колебательное движение с заданными характеристиками, причем траектория, по которой должен двигаться фазовый вектор системы, заранее не задана, не известна или не имеет значения для достижения цели. Подобные задачи хорошо известны в электротехнике, радиотехнике, акустике, лазерной технике, вибрационной технике, где требуется запустить процесс генерации периодических колебаний. К этому классу относятся также задачи диссоциации и ионизации молекулярных систем, выброса из потенциальной ямы, хаотизации и другие задачи, связанные с ростом энергии, возможно приводящим к фазовому переходу в системе. Формально подобные задачи можно свести к задачам слежения, но при этом желаемые движения являются непериодическими, нерегулярными, а целевая траектория может быть задана лишь частично.
Синхронизация. Под синхронизацией понимается совпадение или сближение переменных состояния двух или нескольких систем, либо согласованное изменение некоторых количественных характеристик систем. Задача синхронизации отличается от задачи управления с эталонной моделью, поскольку в ней допускается наличие временных сдвигов между графиками согласуемых переменных. Сдвиги могут либо быть постоянными, либо стремиться к постоянным (асимптотические фазы). Кроме того, во многих задачах синхронизации связи между системами являются двусторонними (двунаправленными). Это значит, что предельный режим в системе (синхронное решение) заранее не известен.
Модификация предельных множеств (аттракторов) систем. Этот класс целей включает такие частные виды целей, как:
— изменение типа равновесия (например, преобразование неустойчивого положения равновесия в устойчивое или наоборот);
— изменение вида предельного множества (например, преобразование предельного цикла в хаотический аттрактор или наоборот; изменение фрактальной размерности предельного множества, и т. д.);
— изменение положения и типа точки бифуркации в пространстве параметров системы;
Задачи подобного типа стали рассматриваться, начиная с 1980-х годов в работах по управлению бифуркациями. В многочисленных работах по управлению хаотическими режимами, часто вообще не предполагается задания количественных характеристик желаемого движения. Вместо этого задается желаемый качественный тип предельного множества (аттрактора). Например, требуется преобразовать хаотические, нерегулярные колебания в периодические или квазипериодические. При необходимости задать количественно желаемую степень хаотичности, нерегулярности, целевые функции можно формировать через известные характеристики хаотичности: показатели Ляпунова, фрактальные размерности, энтропии и т. п., см.[6][7].
Кроме основной цели управления могут быть заданы дополнительные цели или ограничения: например, требование обеспечить достижение цели при малой мощности управления или малых затратах на управление. Требование малости управления важно для физических задач, поскольку оно означает, что внешние воздействия не разрушают присущих физической системе внутренних свойств, не осуществляют «насилия» над системой. Это особенно важно в экспериментальных исследованиях, поскольку его нарушение может привести к наблюдению артефактов — эффектов, отсутствующих при отсутствии направленного воздействия на систему и не наблюдающихся в естественных условиях.
В физических задачах встречаются три типа управления и, соответственно, алгоритмов управления: постоянное, программное и обратная связь. Поскольку реализация управления в виде обратной связи требует возможности измерения необходимых для построения управления величин, которая часто отсутствует, исследование свойств управляемой системы обычно начинают с изучения возможностей низшей формы — постоянного управления, затем переходят к исследованию возможностей управления разомкнутого типа (программного), и лишь после этого исследуются, если возможно, задачи управления с обратной связью.
Типичная формулировка задачи управления с учетом особенностей физического исследования имеет следующий вид:
— найти все возможные виды поведения системы, которые могут быть обеспечены при помощи управляющих функций с нормой, не превышающей заданной (достаточно малой) величины и, возможно, при выполнении заданных ограничений};
При её решении может быть полезным решение вспомогательной задачи, более характерной для работ по теории управления:
— найти управляющую функцию (или закон обратной связи) минимальной нормы, обеспечивающую достижение заданного поведения системы (заданной цели управления).
Методология кибернетической физики основана на хорошо разработанных методах теории управления: методах линейного, нелинейного, оптимального, робастного, адаптивного управления; методах идентификации (реконструкции) параметров, методах фильтрации и оценивания состояний (параметров); методах оптимизации систем. Обычно некоторые параметры физической системы неизвестны, а некоторые переменные недоступны для измерения. По терминологии теории управления это означает, что синтез управления должен выполняться в условиях неопределенности. Для решения подобных задач разработаны методы робастного и адаптивного управления.
Перспективы
В настоящее время внимание физиков к применению кибернетических методов продолжает расти. Активно развиваются следующие области киберфизических исследований:
- Управление колебаниями
- Управление синхронизацией
- Управление бифуркациями и хаосом
- Управление фазовыми переходами, стохастическим резонансом
- Управление механическими системами
- Оптимальное управление в термодинамике
- Управление плазмой, пучками частиц
- Управление молекулярными и квантовыми системами
Среди важнейших направлений прикладных исследований: управление термоядерными реакциями, управление в нано- и фемтотехнологиях. Обзор методов и приложений можно найти в[][19][20][21].
Для обмена информацией специалистов в области кибернетической физики создано Международное общество физики и управления — International Physics and Control Society (IPACS). Общество регулярно проводит конференции (Physics and Control) и поддерживает электронную библиотеку публикаций IPACS Electronic Library Архивная копия от 19 декабря 2010 на Wayback Machine и информационный портал «Physics and Control Resources» Архивная копия от 2 мая 2010 на Wayback Machine.
Примечания
- ↑ 1 2 3 Ott E., Grebogi C., Yorke G. Controlling chaos. Phys. Rev. Lett. 1990. V.64. (11) 1196—1199.
- ↑ 1 2 Алексеев В. В., Лоскутов А. Ю. Дестохастизация системы со странным аттрактором посредством параметрического воздействия. Вестн. МГУ. сер.3, Физика, астрономия. 1985, Т.26, (3), С. 40-44.
- ↑ Алексеев В. В., Лоскутов А. Ю. Управление системой со странным аттрактором посредством периодического параметрического воздействия. ДАН СССР, 1987, Т.293, (6), C. 1346—1348.
- ↑ 1 2 Дудник Е. Н., Кузнецов Ю. И., Минакова И. И., Романовский Ю. М. Синхронизация в системах со странным аттрактором. Вестн. МГУ. Сер. 3: Физика. Астрономия. 1983. Т. 24, (4). С. 84-87.
- ↑ Pyragas K. Continuous control of chaos by self-controlling feedback. Phys. Lett. A. 1992. V.170. 421—428.
- ↑ 1 2 Андриевский Б. Р., Фрадков А. Л. Управление хаосом: Методы и приложения. I. Методы. Автоматика и телемеханика. 2003, (5). C.3-45.
- ↑ 1 2 Андриевский Б. Р., Фрадков А. Л. Управление хаосом: Методы и приложения. II. Приложения. Автоматика и телемеханика. 2004, (4), C.3-34.
- ↑ Leff H.S. and A.F.Rex (Eds). Maxwell’s Demon 2: entropy, classical and quantum information, computing: 2nd edition. Institute of Physics. 2003 (собрание классических и современных статей, посвященных демону Максвелла).
- ↑ J. C. Maxwell. On Governors. Proc. Royal Soc. 16, 1868, 270—283.
- ↑ Бутковский А. Г., Самойленко Ю. И. Управление квантово-механическими процессами. М.: Наука, 1984, 256с. (English translation: Dordrecht: Kluwer Academic Publishers, 1990.)
- ↑ Капица П. Л. Динамическая устойчивость маятника при колеблющейся точке подвеса. ЖЭТФ. 1951. Т.21.(5).
- ↑ Блехман И. И. Вибрационная механика. М.: Наука, 1994.
- ↑ Новиков И. И. Эффективность атомных электростанций. Атомная энергия. 1957. № 3. С. 409—412.
- ↑ Curzon F.L., Ahlburn B., Efficiency of a Carnot engine at maximum power output. Am.J. Phys., 43, 22-24, 1975.
- ↑ Миронова В. А., Амелькин С. А., Цирлин А. М. Математические методы термодинамики при конечном времени. М.: Химия, 2000.
- ↑ Berry R.S., Kazakov V.A., Sieniutycz S., Szwast Z., Tsirlin A.M. Thermodynamic Optimization of Finite Time Processes. Wiley. N.Y., 2000.
- ↑ Fradkov A.L. Exploring nonlinearity by feedback. Physica D. 1999, V. 128, N 2-4. 159—168.
- ↑ Фрадков А. Л. Исследование физических систем при помощи обратных связей. Автоматика и телемеханика. 1999. (3). C. 213—230.
- ↑ 1 2 Фрадков А. Л. Кибернетическая физика. СПб.: Наука, 2003.
- ↑ 1 2 Фрадков А. Л. О применении кибернетических методов в физике. Успехи физ. наук, 2005, Т.175, N 2, с.113-138.
- ↑ 1 2 Fradkov A.L. Cybernetical physics: from control of chaos to quantum control. Springer-Verlag, 2007, 242p.
Ссылки
- Портал «Physics and Control Resources» Архивная копия от 2 мая 2010 на Wayback Machine
- IPACS Electronic Library Архивная копия от 19 декабря 2010 на Wayback Machine
- International Physics and Control Society (IPACS)