Неявная поверхность


Неявная поверхность — это поверхность в евклидовом пространстве, определённая уравнением

Неявная поверхность является множеством нулей функции трёх переменных. Термин неявная здесь означает, что уравнение не решено относительно любой из переменных, x, y или z.
График функции обычно описывается уравнением и такое представление называется явным. Третьим важным способом описания поверхности является параметрическое представление — , где координаты x, y и z точек поверхности представлены тремя функциями , зависящими от общих параметров . Обычно изменение представления поверхности осуществляется просто только в случае, если задано явное представление . Тогда другими двумя представлениями будут (неявное) и (параметрическое).






Примеры:





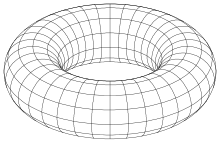
Для плоскости, сферы и тора имеется простое параметрическое представление, что неверно для четвёртого примера.
Теорема о неявной функции описывает условия, при которых уравнение может быть решено (по меньшей мере неявно) относительно x, y или z. Но в общем случае явного решения может и не существовать. Эта теорема является ключевой для вычисления важных геометрических свойств поверхности, таких как касательные плоскости, нормали к поверхности, кривизны (см. ниже). Однако эти поверхности имеют существенный недостаток — их визуализация затруднительна.

Если является многочленом от x, y и z, поверхность называется алгебраической. Пример 5 не является алгебраической поверхностью.

Несмотря на трудность визуализации неявные поверхности дают относительно простые техники для их теоретической генерации (например, Поверхность Штайнера[англ.]*) и поверхности, интересные для практических целей (см. ниже).
Формулы
При следующих соглашениях неявная поверхность представлена уравнением , где функция удовлетворяет необходимым условиям дифференцируемости. Ниже будем обозначать частные производные функции как .


Касательная плоскость и нормальный вектор
Точка поверхности называется регулярной тогда и только тогда, когда градиент функции в точке не равен нулевому вектору , что означает


- .

Если точка поверхности не регулярна, она называется особой (употребляется также термин сингулярная точка).
Уравнение касательной плоскости в регулярной точке

а уравнение нормального вектора

Нормальная кривизна
Чтобы сделать формулы проще, аргументы в формуле ниже опущены. Тогда

является нормальной кривизной поверхности в регулярной точке для единичного касательного вектора направления . является гессианом функции (матрицей вторых производных).


Доказательство этой формулы опирается (как и в случае неявной кривой) на теорему о неявной функции и формулу нормальной кривизны параметрической поверхности.
Приложения неявных поверхностей
Как и в случае неявных кривых легкой задачей является создание неявных поверхностей желаемой формы с помощью алгебраических операций (сложение, умножение) простых примитивов.

Эквипотенциальная поверхность двух точечных зарядов
Точечный заряд в точке образует потенциал в точке (физические константы опущены)




Эквипотенциальная поверхность для значения потенциала является неявной поверхностью , что есть сфера с центром в точке .



Потенциал четырёх точечных зарядов вычисляется пo формуле

На рисунке четыре заряда имеют величину 1 и расположены в точках . Показанная поверхность является эквипотенциальной поверхностью (неявной поверхностью) .


Поверхность постоянного произведения расстояний
Овал Кассини можно определить как множество точек, для которых произведение расстояний от двух заданных точек постоянно (в отличие от эллипса, для которого постоянна сумма расстояний). Аналогично неявные поверхности могут быть определены как постоянное произведение расстояний от некоторых фиксированных точек.
На рисунке метаморфоз верхняя левая поверхность образуется по такому правилу. Эта поверхность является поверхностью уровня функции , где



Метаморфозы неявных поверхностей
Другой простой метод создания новых неявных поверхностей называется метаморфозом неявных поверхностей:
Для двух неявных поверхностей (на рисунке это поверхность постоянного произведения расстояний и тор) определяются новые поверхности с использованием параметра :

![{\displaystyle \mu \in [0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/030ca0eebf53f89d13f475805d065c80355c9390)

На рисунке представлены поверхности с величинами параметра .


Гладкая аппроксимация некоторых неявных поверхностей
-поверхности[1] могут быть использованы для аппроксимирования любого гладкого и ограниченного объекта в , поверхность которого определяется многочленом, который равен произведению других многочленов. Другими словами, мы можем создать любой гладкий объект с единой алгебраической поверхностью. Обозначим многочлены как . Тогда аппроксимирующий объект определяется многочленом


}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b9d28099267fd6eb0853dc52433279c27d65043f)

где определяет смешивающий параметр, контролирующий ошибку аппроксимации.

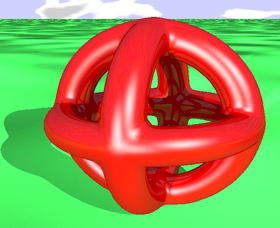
Аналогично гладкой аппроксимации неявных кривых уравнение

представляет для подходящих параметров гладкие аппроксимации трёх пересекающихся торов уравнениями
![{\displaystyle {\begin{aligned}F_{1}=(x^{2}+y^{2}+z^{2}+R^{2}-a^{2})^{2}-4R^{2}(x^{2}+y^{2})=0,\\[3pt]F_{2}=(x^{2}+y^{2}+z^{2}+R^{2}-a^{2})^{2}-4R^{2}(x^{2}+z^{2})=0,\\[3pt]F_{3}=(x^{2}+y^{2}+z^{2}+R^{2}-a^{2})^{2}-4R^{2}(y^{2}+z^{2})=0.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/157d62dcc5f451b1e5f561bd248a425e1f97b28f)
(На рисунке параметры равны )


Визуализация неявных поверхностей
Есть несколько алгоритмов рендеринга неявных поверхностей[3], включая алгоритм «marching cubes»[4]. Фактически, имеются две идеи визуализации неявных поверхностей — одна создаёт сеть многоугольников, которые затем отрисовываются (см. Триангуляризация поверхности[англ.]), а вторая опирается на трассировку лучей, когда определяются точки пересечения лучей с поверхностью[5].
См. также
Примечания
- ↑ 1 2 Raposo, Gomes, 2019.
- ↑ POV-Ray (англ. The Persistence of Vision Ray-Tracer) использует обратную трассировку лучей для создания трехмерных фотореалистических изображений. Сцена в POV-Ray описывается на SDL (англ. Scene Description Language) — интерпретируемом языке программирования с С-подобным синтаксисом. При помощью SDL пользователь задает положение камеры, источников света, размещение объектов и их свойства, атмосферные эффекты и т. п. См статью Научные иллюстрации в POV-Ray Архивная копия от 20 декабря 2019 на Wayback Machine
- ↑ Bloomenthal, Bajaj, Wyvill, 1997.
- ↑ Stephenson, 2004.
- ↑ Haines, Akenine-Moller, 2019.
Литература
- Adriano N. Raposo, Abel J.P. Gomes. Pi-surfaces: products of implicit surfaces towards constructive composition of 3D objects // Journal of WSCG. — 2019. — arXiv:1906.06751. (International Conference in Central Europe on Computer Graphics, Visualization and Computer Vision)
- Jules Bloomenthal, Chandrajit Bajaj, Brian Wyvill. Introduction to Implicit Surfaces. — Morgan Kaufmann, 1997. — ISBN 978-1-55860-233-5.
- Ian Stephenson. Production Rendering: Design and Implementation. — Springer Science & Business Media, 2004. — ISBN 978-1-85233-821-3.
- Eric Haines, Tomas Akenine-Moller. Ray Tracing Gems. — Springer, 2019. — ISBN 978-1-4842-4427-2.
- Gomes A., Voiculescu I., Jorge J., Wyvill B., Galbraith C. Implicit Curves and Surfaces: Mathematics, Data Structures and Algorithms. — London: Springer-Verlag, 2009. — ISBN 978-1-84882-405-8.
- Thorpe J.A. Elementary Topics in Differential Geometry. — New York: Springer-Verlag, 1979. — (Undergraduate Texts in Mathematics). — ISBN 0-387-90357-7.
- Торп Дж. Начальные главы дифференциальной геометрии. — «Мир», 1982. — (Современная математика. Вводные курсы).
Ссылки
- Sultanow: Implizite Flächen Архивная копия от 19 января 2021 на Wayback Machine
- Hartmann: Geometry and Algorithms for COMPUTER AIDED DESIGN Архивная копия от 30 октября 2017 на Wayback Machine
- GEOMVIEW Архивная копия от 11 июля 2000 на Wayback Machine
- K3Dsurf: 3d surface generator Архивная копия от 10 ноября 2020 на Wayback Machine
- SURF: Visualisierung algebraischer Flächen Архивная копия от 8 марта 2021 на Wayback Machine


























