
Велосипе́д — колёсное транспортное средство, приводимое в движение мускульной силой человека через ножные педали или через ручные рычаги. Наиболее распространены двухколёсные велосипеды, но существуют также конструкции с тремя и более колёсами. Стал использоваться как средство передвижения ещё до широкого распространения городского общественного транспорта, в том числе автобусов, троллейбусов и трамваев. Также популярен среди туристов и в спортивных целях. В современном мире также используют электропривод для увеличения области использования велосипеда.

Велокомпью́тер — электронное устройство для измерения скорости и пробега велосипеда, а также дополнительных параметров, таких как средняя скорость, время в пути, максимальная скорость, пульс, передача, текущее время, температура, давление, каденс и др.

Колесо́ — движитель, свободно вращающийся или закреплённый на вращающейся оси диск, позволяющий поставленному на него телу катиться, а не скользить.

Спидо́метр — измерительный прибор для определения модуля мгновенной скорости движения.

«Лунохо́д-1» — луноход, первый в мире планетоход, успешно работавший на поверхности другого небесного тела — Луны с 17 ноября 1970 по 14 сентября 1971 года. Принадлежит к серии советских дистанционно-управляемых самоходных аппаратов «Луноход» для исследования Луны ; работал одиннадцать лунных дней, проехал 10 540 м.

Углы установки автомобильных колёс, известные в обиходе как «развал-схождение», влияют на устойчивость автомобиля, его управляемость и износ шин.

Инерциальная навигация — разновидности методов навигации, основанные на явлении инерции. Инерциальная навигация автономна и не требует наличия внешних ориентиров или поступающих извне сигналов. Неавтономные методы навигации основываются на использовании внешних ориентиров или сигналов и более точны, поскольку не подвержены накоплению ошибок от внешних воздействий. Но в ряде случаев неавтономная навигация не может быть реализована из-за отсутствия видимости или наличия помех для радиосигналов.

Одо́метр, в просторечии счётчик — прибор для измерения количества оборотов колеса. При помощи него может быть измерен пройденный транспортным средством путь. Первый одометр был изобретён Героном Александрийским.

Датчик угла поворота, также энкодер — измерительный преобразователь, предназначенный для преобразования угла поворота вращающегося объекта в цифровые или аналоговые сигналы, позволяющие определить угол его поворота.

Сервомашинка — в моделизме устройство для управления подвижными элементами действующих моделей, к примеру, сочленениями конечностей в роботах, или поворотом колес автомодели. Рулевая машинка состоит из электродвигателя, заключенного в один корпус с редуктором и управляющей электроникой, которая чаще всего состоит из потенциометра обратной связи и платы управления.

Гидравлический усилитель руля (ГУР) — автомобильная гидравлическая система, часть рулевого механизма, предназначенная для облегчения управления направлением движения автомобиля при сохранении необходимой «обратной связи» и обеспечении устойчивости и однозначности задаваемой траектории.

Колесни́ца, ука́зывающая на юг , — первый навигационный прибор, работающий по принципу обратной связи. На колеснице была смонтирована фигурка человека, которая, независимо от направления движения самой колесницы, указывала вытянутой рукой на юг. В этом устройстве не использовался магнитный компас.

Лунный автомобиль — четырёхколёсный транспортный планетоход для передвижения людей по поверхности Луны, использовавшийся в ходе последних экспедиций программы «Аполлон» — «Аполлон-15», «Аполлон-16» и «Аполлон-17» в начале 1970-х годов. Разработчик и генеральный подрядчик — Boeing, конструктор — Ференц Павликс.

Визуальная одометрия — метод оценки положения и ориентации робота или иного устройства с помощью анализа последовательности изображений, снятых установленной на нем камерой.
Мерное колесо — механический счётчик длины, главным элементом которого является специальное тарированное колесо, катящееся по измеряемой поверхности и соединённое со счётчиком оборотов. Колесо изготавливалось определённого диаметра, с заданной длиной окружности обода, равной или кратной применявшейся в конкретную эпоху мере длины. Расстояние определялось умножением количества оборотов на единицу измерения.
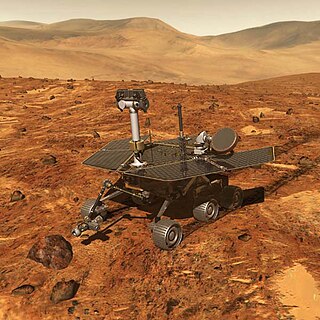
Mars Exploration Rover (MER) — программа НАСА по исследованию планеты Марс с помощью двух однотипных мобильных, передвигающихся по поверхности космических аппаратов — марсоходов. Научный руководитель программы — Стив Скваерс.
SLAM — метод, используемый в мобильных автономных средствах для построения карты в неизвестном пространстве или для обновления карты в заранее известном пространстве с одновременным контролем текущего местоположения и пройденного пути. Популярные методы приближённого решения данной задачи — фильтр частиц и расширенный фильтр Калмана. Некоторые реализации метода используются в беспилотных автомобилях, летательных аппаратах, автономных подводных аппаратах, планетоходах, и даже внутри человеческого тела.
Итеративный алгоритм ближайших точек — алгоритм, использующийся для сведения к минимуму разницы между двумя облаками точек. ICP часто используется для восстановления двухмерных (2D) или трёхмерных (3D) поверхностей из разных сканов, для определения местоположения роботов и планирования оптимального их пути, регистрации модели кости и т.д.

Счётчик гектаров (акров) — механический или электронный прибор, предназначенный для приблизительной оценки площади, обработанной сельскохозяйственной машиной. Счётчики гектаров могут быть установлены на комбайны, сеялки, опрыскиватели и другую технику.

Nissan Pivo — серия из трёх электрических концепт-каров, созданных японской компанией Nissan в 2005, 2007 и 2011 годах. Первая версия была представлена в октябре 2005 года и представляла собой вращающуюся трёхместную кабину, закреплённую на платформе. В 2007 году была представлена вторая модель, получившая соответствующее название Pivo 2. Она сохранила общую конструкцию кузова, но с некоторыми изменениями в дизайне и оснащении, одним из которых стал робот-помощник. Представленная в 2011 году модель Pivo 3 сильно отличается — она уже не является кабиной на платформе, но при этом сохранила расположение мест в салоне и получила систему автоматической парковки.