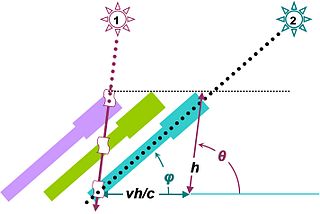
Аберра́ция све́та — изменение направления распространения света (излучения) при переходе из одной системы отсчёта к другой.

Специа́льная тео́рия относи́тельности — теория, описывающая движение, законы механики и пространственно-временные отношения при произвольных скоростях движения, меньших скорости света в вакууме, в том числе близких к скорости света. Фактически СТО описывает геометрию четырёхмерного пространства-времени и основана на плоском пространстве Минковского. Обобщение СТО для сильных гравитационных полей называется общей теорией относительности.
Ско́рость — векторная физическая величина, характеризующая быстроту перемещения и направление движения материальной точки относительно выбранной системы отсчёта. По определению, равна производной  радиус-вектора точки по времени. В СИ измеряется в метрах в секунду.
радиус-вектора точки по времени. В СИ измеряется в метрах в секунду.
Углова́я ско́рость — векторная величина, характеризующая быстроту и направление вращения материальной точки или абсолютно твёрдого тела относительно оси вращения. Модуль угловой скорости для вращательного движения совпадает с мгновенной угловой частотой вращения, а направление перпендикулярно плоскости вращения и связано с направлением вращения правилом правого винта. Строго говоря, угловая скорость представляется псевдовектором, и может быть также представлена в виде кососимметрического тензора.
Преобразова́ния Галиле́я — в классической механике и нерелятивистской квантовой механике: преобразования координат и скорости при переходе от одной инерциальной системы отсчёта (ИСО) к другой. Термин был предложен Филиппом Франком в 1909 году. Преобразования Галилея опираются на принцип относительности Галилея, который подразумевает одинаковость времени во всех системах отсчёта.

Траекто́рия материа́льной то́чки — линия в пространстве, по которой движется тело, представляющая собой множество точек, в которых находилась, находится или будет находиться материальная точка при своём перемещении в пространстве относительно выбранной системы отсчёта. Существенно, что понятие о траектории имеет физический смысл даже при отсутствии какого-либо по ней движения.
Большая полуось — один из основных геометрических параметров объектов, образованных посредством конического сечения.
Враща́тельное движе́ние — вид механического движения. При вращательном движении материальная точка описывает окружность. При вращательном движении абсолютно твёрдого тела все его точки описывают окружности, расположенные в параллельных плоскостях. Центры всех окружностей лежат при этом на одной прямой, перпендикулярной к плоскостям окружностей и называемой осью вращения. Ось вращения может располагаться внутри тела и за его пределами. Ось вращения в данной системе отсчёта может быть как подвижной, так и неподвижной. Например, в системе отсчёта, связанной с Землёй, ось вращения ротора генератора на электростанции неподвижна.
В классической механике, задача двух тел состоит в том, чтобы определить движение двух материальных точек, которые взаимодействуют только друг с другом. Распространённые примеры включают спутник, обращающийся вокруг планеты, планета, обращающаяся вокруг звезды, две звезды, обращающиеся вокруг друг друга, и классический электрон, движущийся вокруг атомного ядра.
Ве́ктор Лапла́са — Ру́нге — Ле́нца — вектор, который используется для описания формы и ориентации орбиты, по которой одно небесное тело обращается вокруг другого. В случае с двумя телами, взаимодействие которых описывается законом всемирного тяготения Ньютона, вектор Лапласа — Рунге — Ленца представляет собой интеграл движения, то есть его направление и величина постоянны независимо от точки орбиты, в которой они вычисляются; говорят, что вектор Лапласа — Рунге — Ленца сохраняется при гравитационном взаимодействии двух тел. Это утверждение можно обобщить на любую задачу с двумя телами, взаимодействующими посредством центральной силы, которая изменяется обратно пропорционально квадрату расстояния между ними. Такая задача называется Кеплеровой задачей.
Орбита́льные элеме́нты, элеме́нты орби́ты небесного тела — набор параметров, задающих размеры и форму орбиты (траектории) небесного тела, расположение орбиты в пространстве и место расположения небесного тела на орбите.

Кеплеровы элементы — шесть элементов орбиты, определяющих положение небесного тела в пространстве в задаче двух тел:
- большая полуось,
- эксцентриситет,
- наклонение,
- долгота восходящего узла,
- аргумент перицентра,
- средняя аномалия.

В физике, при рассмотрении нескольких систем отсчёта (СО), возникает понятие сложного движения — когда материальная точка движется относительно какой-либо системы отсчёта, а та, в свою очередь, движется относительно другой системы отсчёта. При этом возникает вопрос о связи движений точки в этих двух системах отсчета.
В физике кругово́е движе́ние — это вращательное движение материальной точки или тела, когда ось вращения в выбранной системе отсчёта неподвижна и не проходит через центр тела. В этом случае траектория точки или тела является кругом, круговой орбитой. Оно может быть равномерным или неравномерным. Вращение трёхмерного тела вокруг неподвижной оси включает в себя круговое движение каждой его части. Мы можем говорить о круговом движении объекта только если можем пренебречь его размерами, так что мы имеем движение массивной точки на плоскости. Например, центр масс тела может совершать круговое движение.

Релятиви́стское равноуско́ренное движе́ние — такое движение объекта, при котором его собственное ускорение постоянно. Собственным ускорением называется ускорение объекта в сопутствующей (собственной) системе отсчета, то есть в инерциальной системе отсчёта, в которой текущая мгновенная скорость объекта равна нулю. Примером релятивистского равноускоренного движения может быть движение тела постоянной массы под действием постоянной силы. Акселерометр, находящийся на равномерно ускоряющемся теле, не будет менять своих показаний.
В классической механике, задача Кеплера — это частный случай задачи двух тел, в которой два тела взаимодействуют посредством центральной силы  , изменяющейся по величине обратно пропорционально квадрату расстояния
, изменяющейся по величине обратно пропорционально квадрату расстояния  между ними. Сила может быть как притягивающей, так и отталкивающей. Задача состоит в нахождении зависимости координат или скоростей тел от времени при заданных массах и начальных значениях скоростей и координат. С помощью классической механики решение может быть выражено через Кеплеровы орбиты, используя шесть элементов орбит.
между ними. Сила может быть как притягивающей, так и отталкивающей. Задача состоит в нахождении зависимости координат или скоростей тел от времени при заданных массах и начальных значениях скоростей и координат. С помощью классической механики решение может быть выражено через Кеплеровы орбиты, используя шесть элементов орбит.
Эллиптическая орбита — в астродинамике и небесной механике кеплерова орбита с эксцентриситетом меньше 1. Круговая орбита является частным случаем эллиптической орбиты при нулевом эксцентриситете. В более строгом определении эллиптической орбиты круговые орбиты исключаются; таким образом, эллиптические орбиты имеют эксцентриситет строго больше нуля и меньше единицы. В более широком смысле эллиптической орбитой является кеплерова орбита с отрицательной энергией. Такое определение включает и радиальные эллиптические орбиты, эксцентриситет которых равен единице.
Круговая орбита — орбита, все точки которой находятся на одинаковом расстоянии от центральной точки, создаваемая обращающимся вокруг неподвижной оси телом. Может рассматриваться как частный случай эллиптической орбиты при нулевом эксцентриситете. В Солнечной системе почти круговые орбиты у Венеры и Земли.



























