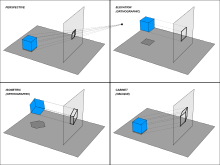
Ортографическая проекция
Ортографическая проекция (также ортогональная проекция, ранее — аналемма) — средство представления трёхмерных объектов на двухмерной плоскости. Ортографическая проекция — это частный случай параллельной проекции, в которой все линии проекции ортогональны плоскости проекции[1]. Результат, полученный на поверхности просмотра, — это аффинное преобразование каждой плоскости объекта.
Термин «ортографический» иногда означает технику многоракурсной проекции[англ.]*, в которой главные оси или плоскости объекта также параллельны плоскости проекции для создания основных видов[1]. Если главные плоскости или оси объекта в ортографической проекции не параллельны плоскости проекции, изображение называется аксонометрическим или вспомогательным видом . Аксонометрическая проекция является синонимом параллельной проекции. Подтипы основных видов включают планы, фасады и разрезы; подтипы вспомогательных видов включают изометрические, диметрические и триметрические проекции.
Геометрия


Простая ортографическая проекция на плоскость z = 0 может быть определена следующей матрицей:

Для каждой точки v = (v x, v y, v z) преобразованная точка Pv будет иметь вид

Зачастую полезнее использовать однородные координаты. Вышеупомянутое преобразование можно представить для однородных координат как

Для каждого однородного вектора v = (v x, v y, v z, 1) преобразованный вектор Pv будет иметь вид

В компьютерной графике одна из наиболее распространённых матриц, используемых для ортографической проекции, может быть определена 6-элементным кортежем (левая, правая, нижняя, верхняя, ближняя, дальняя), который определяет плоскости отсечения. Эти плоскости образуют прямоугольник с минимальным углом (слева, снизу, -вблизи) и максимальным углом (справа, сверху, -вдали)[2].
Объект перемещают так, что его центр находился в начале координат, затем он масштабируется до единичного куба, который определяется наличием минимального угла в (-1,-1,-1) и максимального угла в (1,1, 1).
Ортографическое преобразование может быть задано следующей матрицей:

которая может быть задана как масштабирование S, за которым следует перевод T в форме

Инверсия матрицы проекции P −1, которую можно использовать в качестве матрицы обратного проецирования, определяется следующим образом:

Типы
Три подтипа ортографической проекции — это изометрическая проекция, диметрическая проекция и триметрическая проекция, в зависимости от того угла, на который вид отклоняется от ортогонального[1][3]. Обычно в аксонометрическом рисунке, как и в других типах изображений, одна ось пространства изображается вертикальной.
В изометрической проекции, наиболее часто используемой форме аксонометрической проекции в инженерном чертеже[4], расположение центра проекции таково, что три оси пространства кажутся одинаково укороченными, и между ними существует общий угол 120 °. Поскольку искажение, вызванное ракурсом, является равномерным, пропорциональность между длинами сохраняется, а оси имеют общий масштаб; это облегчает возможность проводить измерения непосредственно по чертежу. Ещё одним преимуществом является то, что углы в 120° легко построить, используя только циркуль и линейку.
В диметрической проекции положение центра таково, что две из трёх осей пространства кажутся одинаково укороченными, причём сопутствующий масштаб и углы представления определяются в соответствии с точкой обзора; масштаб третьего направления определяется отдельно.
В триметрической проекции все три оси пространства кажутся неравномерно укороченными. Масштаб по каждой из трёх осей и углы между ними определяются отдельно в зависимости от угла обзора. Триметрическая перспектива редко используется в технических чертежах[3].
Многоракурсная проекция

При многоракурсной проекции создаётся до шести изображений объекта, называемых основными видами, при этом каждая плоскость проекции параллельна одной из координатных осей объекта. Виды располагаются относительно друг друга по одной из двух схем: проекция первым и третьим углами. В каждом из них изображение видов можно рассматривать как проецирование на плоскости, образующие параллелепипед вокруг объекта. Хотя можно нарисовать шесть сторон, обычно три вида дают достаточно информации для создания трёхмерного объекта. Эти виды известны как вид спереди (также фасад), вид сверху (план) и вид с торца (разрез).
Когда плоскость или ось изображённого объекта не параллельна плоскости проекции и когда на одном изображении видны несколько сторон объекта, это называется вспомогательным видом. Таким образом, изометрическая, диметрическая и триметрическая проекции будут считаться вспомогательными видами в многоракурсной проекции.
Типичной характеристикой многоракурсной проекции является то, что одна ось пространства обычно отображается вертикально.
Картография

Карта ортографической проекции — это картографическая проекция. Подобно стереографической и гномонической проекциям, ортогональная проекция представляет собой перспективную (или азимутальную) проекцию, в которой сфера проецируется на касательную или секущую плоскость. Точка перспективы ортогональной проекции находится на бесконечном расстоянии. На нём изображено полушарие земного шара, каким оно выглядит из космоса, где горизонт представляет собой большой круг. Формы и области искажены, особенно по краям[5][6].
Ортографическая проекция известна с древности, и её картографическое использование хорошо документировано. Гиппарх использовал проекцию во II веке до нашей эры для определения мест восхода и захода звёзд. Примерно в 14 году до н. э. римский инженер Марк Витрувий Поллион использовал проекцию для построения солнечных часов и расчёта положения Солнца[6].
Название «аналемма», которое также означало солнечные часы, показывающие широту и долготу, было распространённым названием до тех пор, пока Франсуа д’Агилон из Антверпена не предложил нынешнее название в 1613 году[6].
Самые ранние сохранившиеся карты проекции представляют собой гравюры земных глобусов 1509 года (анонимно), 1533 и 1551 годов (Иоганнес Шёнер), а также 1524 и 1551 годов (Апиан)[6].
Примечания
- ↑ 1 2 3 Patric Maynard. Drawing Distinctions: The Varieties of Graphic Expression. — Cornell University Press, 2005. — P. 22. — ISBN 0-8014-7280-6.
- ↑ Thormählen. Graphics Programming – Cameras: Parallel Projection – Part 6, Chapter 2. Mathematik Uni Marburg 8 ff (26 ноября 2021). Дата обращения: 22 апреля 2022. Архивировано 25 мая 2022 года.
- ↑ 1 2 McReynolds, Tom. Advanced graphics programming using openGL / Tom McReynolds, David Blythe. — Elsevier, 2005. — P. 502. — ISBN 1-55860-659-9.
- ↑ Godse, Atul P. Computer graphics. — Technical Publications, 1984. — P. 29. — ISBN 81-8431-558-9.
- ↑ Snyder, J. P. Map Projections—A Working Manual (US Geologic Survey Professional Paper 1395). — Washington, D.C. : US Government Printing Office, 1987. — P. 145–153.
- ↑ 1 2 3 4 Snyder, John P. (1993). Flattening the Earth: Two Thousand Years of Map Projections pp. 16-18. Chicago and London: The University of Chicago Press. ISBN 0-226-76746-9.
Виды проекций | |
|---|---|
| |
































