Персональный автоматический транспорт

Персона́льный автомати́ческий тра́нспорт (ПАТ, PRT — Personal Rapid Transit) — вид городского и пригородного транспорта, который автоматически (без водителя) перевозит пассажиров в режиме такси, используя сеть выделенных путей.
В настоящий момент в мире действует одна такая транспортная система. Это сеть ULTra в лондонском аэропорту Хитроу. Система была открыта для пассажиров в 2010 году[1]. Существует также система Транспортная система университета Западной Вирджинии в Моргантауне, отличающаяся от классической концепции ПАТ увеличенным размером вагона.
История
История ПАТ началась приблизительно в 1953 году, когда Дон Фичтер, планировщик городского транспорта, начал разрабатывать альтернативные средства перевозки грузов и пассажиров, впоследствии получившие название PRT. В 1964 году Фичтер опубликовал книгу[2], в которой предложил концепцию автоматического транспорта для районов с низкой и средней плотностью населения. В 1966 году, Министерство благоустройства и городского развития США получило финансирование на «исследования новых систем городского транспорта, который был бы способен перевозить как пассажиров, так и грузы; быстро, безопасно, не загрязняя воздух, и не ухудшая планировку города.» Обзорные результаты исследований[3] были опубликованы в 1968 году и рекомендовали развитие концепции PRT, наряду с другими транспортными системами — такими, как «автобус по вызову» и высокоскоростные междугородние магистрали.
В конце 60-х годов, корпорация Аэроспейс[англ.], организованная Конгрессом США, потратила большое количество средств на развитие технологии PRT, и произвела значительную часть исследований того времени. В 1969 году научная группа опубликовала первое многотиражное описание PRT в журнале Scientific American[4]. В 1978 году команда опубликовала обзор своих результатов в виде книги[5].
В 1967 году, аэрокосмическое отделение французской корпорации Matra начало работы по проекту Aramis[англ.] в Париже. Потратив приблизительно 500 млн франков, проект был закрыт после того, так система не смогла пройти квалификационные испытания в ноябре 1987 года. Транспортные средства системы Aramis должны были двигаться на малом расстоянии друг от друга, формируя «виртуальный поезд», но недостатки программного обеспечения приводили к столкновениям транспортных средств[6].
С 1970 по 1978 год в Японии действовал проект «Контролируемая компьютером система транспортных средств» (Computer-controlled Vehicle System, или CVS). В рамках полномасштабной тестовой инсталляции 84 транспортных средства двигались на скоростях до 60 км/час на путях длиной 4.8 км. В 76-78 годах CVS была установлена и применялась в течение шести месяцев. 12 пассажирских и 4 грузопассажирских транспортных средства перевезли в общей сложности 800 тысяч пассажиров между пятью станциями по путям длиной 1.6 км. Проект CVS был закрыт после того, как Министерство территории, инфраструктуры и транспорта Японии заявило, что система небезопасна и не соответствует существующим правилам о минимальной дистанции.
Намечен к реализации[] в строящемся «зелёном» городе Масдар в ОАЭ (около 3 тыс. такси голландской компании 2getthere). При этом узловые пункты сопряжения с транспортными сетями автодорог и железнодорожных магистралей будут вынесены за пределы города.
В 2016 году в Японии, в городе Фудзисава, намечался к проводению эксперимент по использованию такси без водителя[7]
Транспортные системы с движением только на специальных путях (PRT)
Personal Rapid Transit (PRT) (в переводе — персональный быстрый городской общественный транспорт) — это транспортная система, удовлетворяющая следующим семи критериям, установленным The Advanced Transit Association (ATRA)[8]:
- Полностью автоматические транспортные средства (без водителей);
- Транспортные средства находятся только на специальных путях (guideway), которые предназначены для исключительного использования такими транспортными средствами;
- Небольшие транспортные средства доступны для исключительного использования одним пассажиром или маленькой группой, которая едет вместе по своему выбору — без случайных попутчиков. Транспортные услуги доступны 24 часа в сутки;
- Небольшие специальные пути могут быть надземными, на уровне земли или подземными;
- Транспортные средства могут использовать все специальные пути и станции в единой сети PRT;
- Прямое сообщение из пункта отправления в пункт назначения, без необходимости в пересадке или остановке на промежуточных станциях;
- Транспортные услуги доступны по требованию, а не по твёрдому графику.
Общие черты различных систем PRT
Кроме того, почти все концепции PRT имеет следующие общие черты[9]:
- Полностью автоматическая система, включая управление транспортным средством, маршрутизацию и взимание платы за проезд.
- Транспортные средства оснащены независимой или полунезависимой автоматической бортовой системой управления.
- Специальные пути не пересекаются в одном уровне друг с другом, с потоками наземного транспорта и пешеходов, так как в основном расположены над землёй. В одном уровне могут быть только развилки и слияния специальных путей.
- Специальные пути используют уже существующий землеотвод, так как в основном расположены над уже имеющимися дорогами.
- Развилки и слияния специальных путей не содержат движущихся частей благодаря использованию так называемой пассивной стрелки (англ. passive switch или vehicle-mounted switch) или управляемых колёс транспортного средства.
- Станции расположены на боковых путях (англ. off-line station), поэтому остановившиеся транспортные средства не блокируют движение по главному пути.
- Боковой путь образует полосу торможения перед станцией и полосу разгона после неё, поэтому подъезжающие и отъезжающие от станции транспортные средства не тормозят движение по главному пути.
- Станции расположены в радиусе пешеходной доступности (до 300—400 метров) и по возможности вплотную или внутри обслуживаемых объектов, территорий, зданий и помещений.
- Свободные транспортные средства ожидают пассажиров на станциях.
- В транспортных средствах нет стоячих мест.
- Транспортные средства приводятся в движение электродвигателями, причём в большинстве концепций — вращательными электродвигателями; в большинстве концепций предусмотрена рекуперация электроэнергии (возврат в электросеть или аккумулятор) при торможении.
Транспортные системы с движением как на специальных путях, так и по обычным дорогам (Dual Mode)
Dual Mode Transit (в переводе — двухрежимный городской общественный транспорт) или обычно Dual Mode (реже DM) — это транспортная система, в которой электромобили могут ездить как по обычным дорогам под управлением водителя, так и на специальных путях в автоматическом режиме на большие расстояния.
Новым и менее употребительным синонимом PRT является Personal Automated Transport (PAT) (в переводе с английского — персональный автоматический транспорт). Однако часть изобретателей и сторонников включают в понятие Personal Automated Transport как собственно PRT, так и Dual Mode.
Концепции Dual Mode Transit обычно подразделяются на две подкатегории — Palleted Dual Mode (поддонный Dual Mode) и True Dual Mode (истинный Dual Mode). В Palleted Dual Mode электромобили перевозятся на автоматических носителях (pallet). В некоторых концепциях Palleted Dual Mode на автоматических носителях перевозятся обычные автомобили. В True Dual Mode электромобили едут на специальных путях своим ходом, но в автоматическом режиме. В некоторых концепциях смешаны Palleted Dual Mode и True Dual Mode.
К понятию True Dual Mode примыкают Automated Highway Systems (в переводе с английского — системы автоматических шоссе), где модифицированные автомобили могут ездить, группироваться (platooning) и совершать маневры в автоматическом режиме не на специальных путях, а на выделенных полосах движения существующих шоссе, на которые может быть нанесена специальная автоматически считываемая (магнитная) разметка.
В True Dual Mode основная ответственность за безопасные маневры транспортных средств возлагается на инфраструктуру, то есть на полностью изолированные специальные пути и в большинстве концепций на стационарную систему управления (наряду с бортовой). Но в Automated Highway Systems она возлагается на специально оборудованные транспортные средства с машинным зрением, радарами, лазерными датчиками, системами GPS и распознавания образов (транспортных средств, пешеходов, дорожных знаков и разметки) и сложными бортовыми системами управления и взаимодействия транспортных средств.
Automated Highway Systems не относятся к категории персонального автоматического транспорта. В то же время, в некоторых концепциях персонального автоматического транспорта, как и в Automated Highway System, предусматривается движение в автоматическом режиме по обычным подъездным дорогам, зонам станций персонального автоматического транспорта, промышленным и парковым зонам. При этом безопасность движения обеспечивается за счёт малой скорости, ограждений, предупредительной разметки и сигнализации и за счёт поддержания дистанций, позволяющих затормозить перед любым внезапно возникшим впереди транспортным средством, человеком, животным и иным препятствием.
В ряде концепций автоматические носители (с электромобилями, с грузом или порожние) или электромобили могут ездить на тех же специальных путях, что и исключительно автоматические транспортные средства Personal Rapid Transit. Для этих смешанных концепций используют ещё не устоявшийся термин Multimodal Personal [Automated] Transport (MPT) (в переводе с английского — многорежимный или мультимодальный персональный [автоматический] транспорт).
Сравнение различных концепций персонального автоматического транспорта друг с другом
В таблице, приведенной ниже, чёрными кружками обозначено наличие тех или иных конструктивных особенностей у различных концепций персонального автоматического транспорта.
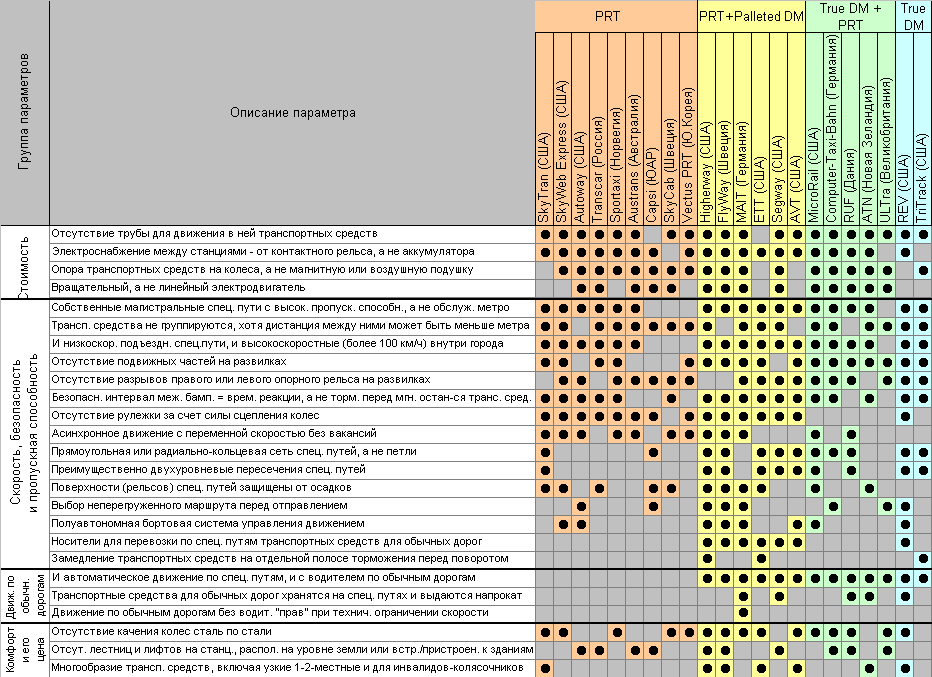
Пояснения к таблице:
Отсутствие трубы для движения в ней транспортных средств. В некоторых проектах транспортные средства должны двигаться внутри трубы, защищающей транспортные средства и специальные пути от осадков и посторонних предметов. Несколько проектов предполагают создание вакуума внутри трубы для уменьшения сопротивления воздуха.
Собственные магистральные специальные пути с высокой пропускной способностью, а не обслуживание метро.
Транспортные средства не группируются, хотя дистанция между ними может быть меньше метра. Некоторые проекты предусматривают физическое сцепление транспортных средств или их группировку средствами системы управления.
И низкоскоростные подъездные специальные пути, и высокоскоростные (более 100 км/ч) внутри города.
Отсутствие подвижных частей на развилках. Обычная железнодорожная стрелка имеет подвижные элементы (остряки). Когда такую стрелку проходят один за другим два вагона, одному из которых надо влево, а другому — вправо, между ними приходится оставлять достаточную дистанцию, чтобы стрелка успела сработать. В системах, где рулём снабжены сами вагоны, дистанция может быть минимальной, однако при этом расстояния между развилками или слияниями должны быть достаточно велики — для своевременного срабатывания рулевых устройств.
Безопасный интервал между бамперами равен времени реакции, а не торможения перед мгновенно остановившимся транспортным средством. Различные проекты основываются на различных принципах расчёта минимального безопасного интервала или дистанции.
- Характерный для автомобильного транспорта принцип требует, чтобы интервал между бамперами был равен времени реакции на внезапное торможение транспортного средства впереди. Для водителя это 1,5 секунды при наилучших условиях, то есть при скорости 60 км/ч, а для персонального автоматического транспорта — от 2 секунд (у «консервативных» разработчиков) до 0,5 секунды (у большинства разработчиков) и 0,1 секунды (у самых «смелых»[неизвестный термин] разработчиков). При скорости 230 км/ч и промежутке между транспортными средствами 15 см [sites.google.com/site/skytaxi21/bezopasnost#TOC-1 время реакции должно быть не более 2,3 миллисекунды], что вполне приемлемо для систем управления реального времени Архивная копия от 13 сентября 2020 на Wayback Machine.
- Наиболее консервативный, характерный для железнодорожного транспорта с его поездами большой вместимости, принцип «кирпичной стены» Архивная копия от 4 июня 2011 на Wayback Machine («калька» с английского) требует, чтобы транспортное средство затормозило без столкновения с внезапно остановившимся (из-за падения дерева, крушения и т. п.) транспортным средством впереди, как будто перед внезапно выросшей кирпичной стеной.
Отсутствие рулёжки за счёт силы сцепления колёс. Автомобиль удерживается в повороте за счёт сцепления шин, а поезд — за счёт конусовидности колеса (реборда является только страхующим элементом). Также возможно удержание на рельсах с помощью специальных роликов с вертикальной осью (в большинстве проектов персонального автоматического транспорта).
Прямоугольная или радиально-кольцевая сеть специальных путей, а не петли.
Поверхности (рельсов) специальных путей защищены от осадков.
Выбор неперегруженного маршрута перед отправлением. Выбор неперегруженного маршрута до отправления позволяет предотвратить перегрузку специальных путей, перегрузку станции назначения и образование «пробок».
Полуавтономная бортовая система управления движением. В зависимости от местонахождения и роли компьютеров различают автономную или полуавтономную бортовую систему управления движением и систему управления движением без бортовых компьютеров.
- Система управления движением без бортовых компьютеров не функционирует при пропадании связи транспортного средства со стационарной системой управления движением. Очевидно, что в такой системе столкновения транспортных средств неизбежны (стр. 29, а в первоисточнике стр. 110)[].
- Если функции системы управления движением распределены между бортовыми и стационарными (центральным, зональными или функционально специализированными) компьютерами, то бортовая система управления движением является полуавтономной. Некоторые функции могут выполняться как бортовыми, так и стационарными компьютерами — штатно или только при пропадании связи (например, функция поддержания безопасной дистанции) или при иных чрезвычайных ситуациях.
- Если стационарной системы управления движением нет, то говорят об автономной системе управления движением.
Носители для перевозки по специальным путям транспортных средств для обычных дорог. Транспортные средства для обычных дорог могут перевозиться по специальных путям или своим ходом (английский термин — True Dual Mode), или же на специальных носителях.
Замедление транспортных средств на отдельной полосе торможения перед поворотом. Повороты могут осуществляться как на полной скорости — с большим радиусом, так и с замедлением — с малым радиусом. Большие радиусы поворотов, особенно на высокоскоростных участках специальных путей, плохо вписываются в городскую застройку. Замедление может осуществляться как на главной полосе движения, так и на отдельной полосе торможения.
Стандарты
К персональному автоматическому транспорту могут быть применены с оговорками стандарты такой организации, как the Automated People Mover (APM) Standards Committee Архивная копия от 15 июня 2008 на Wayback Machine (англ.). APM (англ.) — это автоматический транспорт, движущийся по эстакаде, перевозящий большие группы пассажиров по фиксированным маршрутам, обычно в аэропортах, в деловых районах городов и в парках отдыха.
В частности, представляют интерес следующие стандарты:
- APM standard part 1 ASCE 21-05 — Operating environment, safety requirements, system dependability, automatic train control, audio and visual communications. (Условия эксплуатации, требования безопасности, надёжность системы, автоматическая система управления поездом, звуковые и визуальные средства связи)
- APM standard part 2 ASCE 21-98 — Vehicles, propulsion and braking. (Транспортные средства, тяга и торможение)
- APM standard part 3 ASCE 21-00 — Electrical equipment, stations, guideways. (Электрооборудование, станции, направляющие пути)
В APM standard part 2 ASCE 21-98 (см. Urban Maglev Technology Development Program (англ.), стр. 84) установлены следующие предельные комфортные значения для сидящих пассажиров APM:
| Параметр | Пределы комфорта (единицы гравитации) | Пределы комфорта (единицы СИ) |
|---|---|---|
| Максимальное вертикальное ускорение | 0,1 g (вверх); 0,4 g (вниз) | 1 м/с² (вверх); 4 м/с² (вниз) |
| Максимальное боковое ускорение | 0,25 g | 2,5 м/с² |
| Максимальное продольное ускорение | 0,25 g | 2,5 м/с² |
| Максимальное ускорение при торможении | −0,25 g | −2,5 м/с² |
| Ускорение при экстренном торможении | −0,36 g | −3,5 м/с² |
| Максимальный вертикальный рывок | 0,3 g/с | 3 м/с³ |
| Максимальный боковой рывок | 0,25 g/с | 2,5 м/с³ |
| Максимальный продольный рывок | 0,25 g/с | 2,5 м/с³ |
К персональному автоматическому транспорту движущемуся по рельсам следует применять «Железнодорожные правила о безопасном интервале/дистанции», которые требуют обновления с учетом специфических особенностей персонального автоматического транспорта. Регулирование вопросов безопасности для этого вида транспорта можно предложить вести с учетом требований к статистической частоте инцидентов на миллион километров на одно транспортное средство.
| Вид инцидента | Статистическая величина происшествий на 1 млн км/транспортное средство |
|---|---|
| Со смертельными случаями | 0,006 |
| C тяжелыми травмами | 0,106 |
| C легкими травмами | 0,732 |
| C повреждением только имущества | 14,939 |
(см. Daventry PRT Scoping Study Архивная копия от 5 марта 2016 на Wayback Machine (англ.), стр. 108—109).
Примечания
- ↑ Архивированная копия. Дата обращения: 24 февраля 2013. Архивировано 12 апреля 2012 года.
- ↑ Donn Fichter. Individualized Automatic Transit and the City. — Providence, RI, 1964.
- ↑ Leone M.Cole, Harold W. Merritt. Tomorrow's Transportation: New Systems for the Urban Future. — U.S. Department of Housing and Urban Development, Office of Metropolitan Development, 1968.
- ↑ Systems Analysis of Urban Transportation Systems, Scientific American, 1969 221:19-27
- ↑ Jack Irving, Harry Bernstein, C. L. Olson and Jon Buyan. Fundamentals of Personal Rapid Transit = http://www.advancedtransit.net/content/fundamentals-personal-rapid-transit-book. — D.C. Heath and Company, 1978.
- ↑ en:Bruno Latour. Aramis, or the Love of Technology. — Harvard University Press, 1996.
- ↑ Такси без водителей – уже в 2016 году. Авто Mail.Ru. Дата обращения: 25 ноября 2017. Архивировано 1 декабря 2017 года.
- ↑ PRT Background. Дата обращения: 11 июля 2009. Архивировано из оригинала 28 июля 2012 года.
- ↑ Comparison Matrix of Ready and Emerging Innovative Transportation Technologies. Дата обращения: 11 июля 2009. Архивировано 29 августа 2009 года.
Ссылки
- Рельсы нам помогут // «Компьютерра-Онлайн», 30 апреля 2008 года
- Автомобили Mercedes начинают «разговаривать» друг с другом Архивная копия от 5 марта 2016 на Wayback Machine // «Компьютерра-Онлайн», 18 июня 2013 года
- The Advanced Transit Association (ATRA) Архивная копия от 21 августа 2006 на Wayback Machine (англ.)
- Innovative Transportation Technologies Архивная копия от 19 августа 2006 на Wayback Machine (англ.)
- 2005 British Telecom Technology Timeline (August 2005) Архивная копия от 30 августа 2006 на Wayback Machine (англ.)
- New Jersey Study on Personal Rapid Transit Архивная копия от 4 ноября 2009 на Wayback Machine (англ.)
| Рельсовый |
| ||||||
|---|---|---|---|---|---|---|---|
| Безрельсовый маршрутный |
| ||||||
| Водный | |||||||
| Воздушный | |||||||
| Наёмный | |||||||
| Прочий | |||||||
| Системы и инфраструктура | |||||||
| Оплата проезда |
| ||||||
| Управление | |||||||