Рычаг

Рыча́г — простейший механизм, представляющий собой балку, вращающуюся вокруг неподвижной точки опоры.
Общие сведения
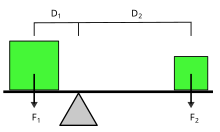
Рычаг относится к простейшим механизмам. Представляет собой жёсткую палку, имеющую возможность вращаться вокруг точки опоры (подвеса). Части палки от точки опоры до точки приложения сил, называют «плечами» рычага. Относительно точки опоры, места приложения сил могут быть по разные стороны (рычаг I рода) или с одной стороны (рычаг II рода)[1].
Рычаг используется для создания большего усилия на коротком плече с помощью меньшего усилия на длинном плече (или для получения большего перемещения на длинном плече с помощью меньшего перемещения на коротком плече). Сделав плечо рычага достаточно длинным, теоретически, можно развить любое усилие.
Частными случаями рычага являются также два других простейших механизма — дифференциальный ворот и блок.
История
Человек стал использовать рычаг ещё в доисторические времена, интуитивно понимая его принцип. Такие инструменты, как мотыга или весло, применялись, чтобы уменьшить силу, которую необходимо было прикладывать человеку. В пятом тысячелетии до нашей эры в Месопотамии применялись весы, использовавшие принцип рычага для достижения равновесия[2][3]. Позже, в Греции, был изобретён безмен, позволивший изменять плечо приложения силы, что сделало использование весов более удобным. Около 1500 года до н. э. в Египте и Индии появился шадуф (колодец-журавль), прародитель современных кранов, устройство для поднимания сосудов с водой[4].

Неизвестно, пытались ли мыслители тех времён объяснить принцип работы рычага. Первое письменное объяснение дал в III веке до н. э. Архимед, связав понятия силы, груза и плеча. Закон равновесия, сформулированный им, используется до сих пор и звучит как «усилие, умноженное на плечо приложения силы, равно нагрузке, умноженной на плечо приложения нагрузки, где плечо приложения силы — это расстояние от точки приложения силы до опоры, а плечо приложения нагрузки — это расстояние от точки приложения нагрузки до опоры». По легенде, осознав значение своего открытия, Архимед воскликнул: «Дайте мне точку опоры, и я переверну Землю!»[4].
В современном мире принцип действия рычага используется повсеместно. Практически любой механизм, преобразующий механическое движение, в том или ином виде использует рычаги. Подъёмные краны, двигатели, плоскогубцы, ножницы, а также тысячи других механизмов и инструментов используют рычаги в своей конструкции.
Принцип действия


Принцип работы рычага является прямым следствием закона сохранения энергии. Чтобы переместить рычаг на расстояние сила, действующая со стороны груза, должна совершить работу равную:

- .

Если посмотреть с другой стороны, сила, приложенная с другой стороны, должна совершать работу
- ,

где — это перемещение конца рычага, к которому приложена сила . Чтобы выполнялся закон сохранения энергии для замкнутой системы, работа действующей и противодействующей сил должны быть равны, то есть:


- ,

- .

По определению подобия треугольников, отношение перемещений двух концов рычага будет равно отношению его плеч:
- , следовательно

- .

Учитывая, что произведение силы и расстояния от точки опоры до линии действия силы является модулем момента силы, можно сформулировать принцип равновесия для рычага. Рычаг находится в равновесии, если сумма моментов сил (с учётом знака), приложенных к нему, равна нулю (точнее, если векторная сумма моментов сил, приложенных к нему, равна нулю).
Для рычагов, как и для других механизмов, вводят характеристику, показывающую механический эффект, который можно получить за счёт рычага. Такой характеристикой является передаточное отношение, оно показывает, как соотносятся нагрузка и приложенная сила:
- .

Как и у любого механизма, у рычага полезная работа меньше полной. Например, у большинства рычагов коэффициент полезного действия (КПД) равен ~80%. Остальные 20% работы расходуются на преодоление силы трения шарнира (подшипника), воздуха.
Составной рычаг
Составной рычаг представляет собой систему из двух и более простых рычагов, соединённых таким образом, что выходное усилие одного рычага является входным для следующего. Например, для системы из двух последовательно связанных рычагов, если на входное плечо первого рычага приложена сила , на другом конце этого рычага выходное усилие окажется , и связаны они будут с помощью передаточного отношения:

- .

При этом на входное плечо второго рычага будет воздействовать такое же усилие , а выходным усилием второго рычага и всей системы будет , передаточное отношение второй ступени будет равно:

- .

При этом механический эффект всей системы, то есть всего составного рычага, будет вычисляться как отношение входного и выходного усилия для всей системы, то есть:
- .

Таким образом, передаточное отношение составного рычага, состоящего из двух простых будет равно произведению передаточных отношений входящих в него простых рычагов.

Такой же подход решения можно применять и для более сложной системы, состоящей, в общем случае из n рычагов. В этом случае в системе будет присутствовать 2n плеч. Передаточное отношение для такой системы будет вычисляться по формуле:
- ,

где:
- — это i-ое плечо системы;
- — сила, передаваемая с плеча (i-1) на плечо i;
- — передаточное отношение всей системы.



Как видно из формулы для этого случая также верно, что передаточное отношение составного рычага равно произведению передаточных отношений входящих в него элементов.
Типы рычагов
Различают рычаги 1 рода, в которых точка опоры располагается между точками приложения сил, и рычаги 2 рода, в которых точки приложения сил располагаются по одну сторону от опоры. Среди рычагов 2 рода выделяют рычаги 3 рода, с точкой приложения «входящей» силы ближе к точке опоры, чем нагрузки, что даёт выигрыш в скорости и пути.
Примеры: рычаги первого рода — детские качели (перекладина), ножницы; рычаги второго рода — тачка (точка опоры — колесо), приподнимание предмета ломом движением вверх; рычаги третьего рода — задняя дверь багажника или капот легковых автомобилей на гидравлических телескопических упорах, подъём кузова самосвала (с гидроцилиндром в центре), движение мышцами рук и ног человека и животных, метла.
Примечания
- ↑ Пёрышкин А. В. Физика. 7 класс. Учебник. — М.: Издательство Дрофа, 2015. — 224 с. — 50000 экз. — ISBN 978-5-358-15852-8. Архивная копия от 7 июня 2016 на Wayback Machine
- ↑ В. Н. Пипуныров. История весов и весовой промышленности в сравнительно-историческом освещении. М, 1955 г.
- ↑ История весов. Дата обращения: 6 апреля 2010. Архивировано 23 августа 2011 года.
- ↑ 1 2 Lever: World Invention Summary (англ.). Дата обращения: 6 мая 2010. Архивировано 23 августа 2011 года.
| В библиографических каталогах |
|---|
| Классические простейшие механизмы | |
|---|---|

















