Hazcam



Hazard avoidance cameras (Hazcams) (с англ. — «камеры избегания опасности») — тип камер, обычно устанавливаемых спереди и сзади планетоходов для обеспечения безопасности во время манёвров по поверхности небесного тела.
Такие камеры устанавливались на марсоходах NASA — Спирите и Оппортьюнити (космическая программа Mars Exploration Rover)[1], Кьюриосити[2], а также на китайском луноходе Юйту (на нижней передней части).
Обзор
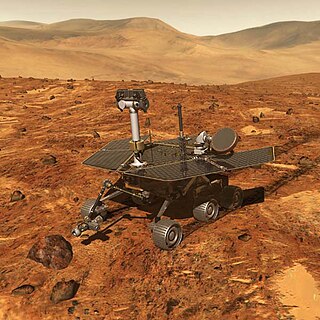
Марсоходы Mars Exploration Rover
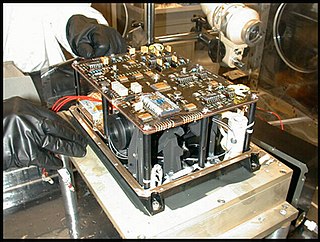
Марсоходы миссии Mars Exploration Rover имеют 2 пары черно-белых Hazcam — одна спереди, другая сзади — всего 4 камеры[1]. Hazcam состоит из двух частей: блока электроники и детекторной головки, которая включает в себя оптическую часть и ПЗС-матрицу[1]. Два блока соединяются эластичным шлейфом. В связи с тем, что блок электроники находится вне марсохода, то он содержит нагревающийся резистор, который обогревает электронику до минимальной рабочей температуры в −55 °C[1]. Они имеют светосилу f/15 и фокусное расстояние 5,58 мм с полем зрения 124° × 124° по горизонтали/вертикали (180° по диагонали)[1]. В Hazcam применяется ПЗС-матрица с разрешением 1024 × 2048 фирмы Mitel. Чип разделен на две части: одна часть размером 1024×1024 чувствительна к свету и непосредственно создаёт изображения, а вторая часть размером 1024 × 1024 принимает эти данные для хранения/считывания[1]. Чтобы не быть чувствительной к свету она закрыта чёрным алюминиевым экраном. Угловое разрешение Hazcam в центре изображения 2,1 мрад/пиксель, что сопоставимо с камерами спускаемых аппаратов «Викинг», работающих в режиме низкого разрешения (2,1 мрад/пиксель), выше, чем у камер марсохода Соджорнер (3,1 мрад/пиксель) и ниже, чем у камер спускаемого аппарата Mars Pathfinder (0,99 мрад/пиксель). Hazcam монтируются на титановой планке с расстоянием 10 см между камерами для создания стереоснимков[1]. Передняя и задняя планка из титана крепятся прямо к внешней части «теплового блока с электроникой», что обеспечивает возвышение Hazcam над поверхностью на 0,5 м[1]. Блок электроники имеет размеры 67 × 69 × 34 мм, а детекторная головка 41 × 51 × 15 мм. Каждая камера весит 245 грамм и потребляет около 2,2 Вт энергии без обогревателя[1].
Марсоход Кьюриосити
Марсоход Кьюриосити имеет 4 пары камер Hazcam (2 спереди и 2 сзади — всего 8 камер)[2]. Две пары являются основными, ещё две резервными, в случае выхода из строя основных[2]. Hazcam Кьюриосити идентичны камерам Hazcam марсоходов миссии Mars Exploration Rover, за исключением использования более мощного нагревателя мощностью 3,5 Вт и защитного покрытия[2]. Изображения используются внутренним компьютером марсохода для автономной навигации и избегания потенциально опасностных мест. Из-за их расположения с обеих сторон марсохода, снимки как от передних, так и от задних камер могут одновременно использоваться для создания 3D-карты ближайшего окружения. Поскольку камеры зафиксированы (то есть не могут перемещаться независимо относительно марсохода), они имеют широкое поле зрения (124° × 124°), чтобы захватить обширный участок местности[2].
Hazcam считаются инженерными камерами, поскольку они не предназначены для использования в научных целях. Navcam — ещё один набор инженерных камер на планетоходах.
Именно благодаря Hazcam 6 августа 2012 года была подтверждена успешная посадка марсохода Кьюриосити (Mars Science Laboratory) на поверхность красной планеты.
Галерея
 |  |  |  |
| Застревание марсохода Оппортьюнити в песчаной дюне, обнаруженное благодаря камерам Hazcam | Анимация из снимков камер Hazcam, демонстрирующая попытки Оппортьюнити покинуть рыхлый слой песка, в котором он застрял | Марсоход Спирит застрял в песке, из которого ему не суждено было выбраться | Первое изображение, которое сделал марсоход Кьюриосити 6 августа 2012 года и благодаря которому была подтверждена успешность посадки |
Примечания
- ↑ 1 2 3 4 5 6 7 8 9 J. N. Maki, J. F. Bell III, K. E. Herkenhoff, S. W. Squyres, A. Kiely, M. Klimesh, M. Schwochert, T. Litwin, R. Willson, A. Johnson, M. Maimone, E. Baumgartner, A. Collins, M. Wadsworth, S. T. Elliot, A. Dingizian, D. Brown, E. C. Hagerott, L. Scherr, R. Deen, D. Alexander, J. Lorre. Mars Exploration Rover Engineering Cameras // JOURNAL OF GEOPHYSICAL RESEARCH. — 2003. — Vol. 108. — P. 24. — doi:10.1029/2003JE002077. Архивировано 6 августа 2018 года.
- ↑ 1 2 3 4 5 MSL - Hazard Avoidance Camera (Hazcam) (англ.). NASA/JPL. Архивировано 8 августа 2018 года.

Исследование Марса космическими аппаратами | |
|---|---|
| Пролётные | |
| Орбитальные | |
| Посадочные | |
| Марсоходы | |
| Марсолёты | |
| Запланированные |
|
| Предложенные | |
| Потерянные | |
| Отменённые | |
| См. также | |