
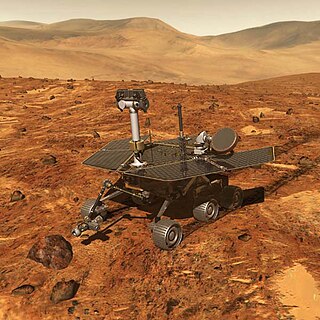
«Спи́рит», «Spirit», или «MER-A» — первый марсоход космического агентства НАСА из двух запущенных США в рамках проекта Mars Exploration Rover. Старт миссии состоялся 10 июня 2003 года. Спускаемый аппарат с марсоходом совершил мягкую посадку на Марс 4 января 2004 года за три недели до прибытия его близнеца «Оппортьюнити» (MER-B), который был успешно доставлен в другой район Марса, смещённый по долготе примерно на 180 градусов. В мае 2009 года марсоход застрял в песчаной дюне. Последняя связь с Землёй была 22 марта 2010 года.

Марсохо́д — планетоход, передвигающийся по поверхности Марса. Мягкая посадка марсоходов осуществляется с помощью спускаемых аппаратов.

Mars Reconnaissance Orbiter, MRO — многофункциональная автоматическая межпланетная станция (АМС) НАСА, предназначенная для исследования Марса. Аппарат построен компанией Lockheed Martin под руководством Лаборатории Реактивного Движения, на проект было потрачено 720 млн долл. Управляет аппаратом Лаборатория реактивного движения ; научной стороной миссии управляет НАСА.

Mars Pathfinder — программа НАСА по изучению Марса с помощью стационарной марсианской станции и марсохода «Соджорнер». Станцию позже переименовали в Мемориальную станцию Карла Сагана. Соджорнер стал первым планетоходом, действующим за пределами системы Земля — Луна.
Список искусственных объектов, которые достигли поверхности Марса. В список включены космические аппараты предназначенные для научных исследований на поверхности Марса. Неподвижные аппараты — автоматические марсианские станции (АМС) и мобильные аппараты, передвигающиеся по поверхности — марсоходы.

«ЭкзоМарс» — совместная астробиологическая программа Европейского космического агентства (ЕКА) и госкорпорации «Роскосмос» по исследованию Марса, основной целью которой был поиск жизни на Марсе или следов её существования в прошлом.
Mars Exploration Rover (MER) — программа НАСА по исследованию планеты Марс с помощью двух однотипных мобильных, передвигающихся по поверхности космических аппаратов — марсоходов. Научный руководитель программы — Стив Скваерс.

«Кьюрио́сити» — марсоход третьего поколения, разработанный для исследования кратера Гейла на Марсе в рамках миссии НАСА "Марсианская научная лаборатория". Марсоход представляет собой автономную химическую лабораторию в несколько раз больше и тяжелее предыдущих марсоходов «Спирит» и «Оппортьюнити».

High Resolution Imaging Science Experiment (HiRISE) — камера, установленная на борту космического аппарата Mars Reconnaissance Orbiter для изучения Марса. HiRISE камера была создана компанией Ball Aerospace & Technologies под руководством Аризонского университета и Лунно-планетарной лаборатории. Прибор обошёлся в $ 40 млн, а его вес составляет 65 кг. Камера представляет собой телескоп-рефлектор с апертурой 0,5 м. Этот телескоп является самым большим телескопом, отправленным в глубокий космос. Разрешение камеры достигает 30 см на пиксель при нахождении на высоте в 300 км над поверхностью Марса.
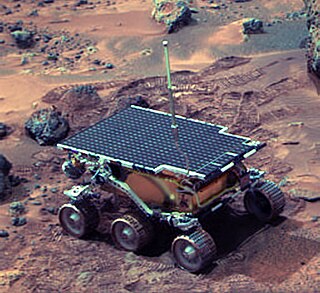
«Соджорнер» — марсоход космического агентства НАСА, запущенный в рамках программы «Марс Патфайндер».

Mars Orbiter Camera и Mars Observer Camera (MOC) — две идентичные научные камеры, которые были установлены на борту двух исследовательских станций: Mars Global Surveyor и Mars Observer соответственно. Mars Orbiter Camera была создана компанией Malin Space Science Systems (MSSS) для NASA. Стоимость всего проекта MOC составила около 44 млн. долл. США, что выше, чем предполагал бюджет проекта.
«Марсианская научная лаборатория» (МНЛ) — программа НАСА, в ходе выполнения которой на Марс успешно доставлен и эксплуатируется марсоход третьего поколения «Кьюрио́сити». Марсоход представляет собой автономную химическую лабораторию в несколько раз больше и тяжелее предыдущих марсоходов «Спирит» и «Оппортьюнити». Аппарат должен будет за несколько месяцев пройти от 5 до 20 километров и провести полноценный анализ марсианских почв и компонентов атмосферы. Для выполнения контролируемой и более точной посадки использовались вспомогательные ракетные двигатели.

Juno Camera — камера/телескоп, установленная на борту космического аппарата «Юнона», который был запущен 5 августа 2011 года и прибытие которого к Юпитеру ожидается в 2016 году. JunoCam была создана компанией Malin Space Science Systems (MSSS) для NASA.

«Розалинд Франклин», ранее известный как «ЭкзоМарс» — планируемый марсоход, который являлся частью международной миссии «ЭкзоМарс», проводимой под эгидой Европейского космического агентства (ЕКА) и Госкорпорации «Роскосмос». Назван в честь английского биофизика Розалинды Франклин.

Pancam — одна из двух электронных стереокамер на «Спирите» и «Оппортьюнити» — марсоходах миссии Mars Exploration Rover. Оборудована набором из 8 сменных светофильтров, меняющихся благодаря вращающемуся барабану, что позволяет просматривать разные длины волн света. На марсоходах устанавливается пара Pancam, рядом с парой Navcam на панели камер MER, которая, в свою очередь, закреплена на мачте высотой 1,5 метров.
Miniature Thermal Emission Spectrometer (Mini-TES) — инфракрасный спектрометр с преобразованием Фурье, используемый для определения состава объекта на расстоянии. Проводя измерения в тепловой инфракрасной части электромагнитного спектра, он обладает способностью проникать сквозь слой пыли, которая характерна для поверхности Марса, что проблематично для дистанционных наблюдений. Mini-TES устанавливался на борту двух марсоходов-близнецов космического агентства NASA — «Спирите» (MER-A) и «Оппортьюнити» (MER-B), которые совершили посадку на Марс в январе 2004 года по программе Mars Exploration Rover.

Hazard avoidance cameras (Hazcams) (с англ. — «камеры избегания опасности») — тип камер, обычно устанавливаемых спереди и сзади планетоходов для обеспечения безопасности во время манёвров по поверхности небесного тела.

Microscopic imager (MI) (с англ. — «микрокамера; камера для микросъёмки») — монохромная электронная камера, предназначенная для макросъёмки марсианской поверхности. Устанавливалась на «Спирите» и «Оппортьюнити» — марсоходах миссии Mars Exploration Rover.

MarsDial — солнечные часы, специально разработанные для беспилотных полётов на Марс. С их помощью по длине и направлению отбрасываемой тени можно вычислить время суток. Также часы используются для калибровки камер Pancam на Марсе. MarsDial устанавливались на борту марсоходов миссии Mars Exploration Rover — «Спирите» и «Оппортьюнити», с надписью «Два Мира, Одно Солнце» и слово «Марс» на 22 языках. MarsDial выполняет функции гномона, используя для этого палочную вертикальную часть. Солнечные часы также могут использоваться для определения истинного Северного направления — преодолев ограничения Северного магнитного полюса.
«Персеве́ранс» — марсоход, разработанный для исследования кратера Езеро на Марсе в рамках экспедиции НАСА «Марс-2020». Был изготовлен Лабораторией реактивного движения НАСА и запущен к Марсу 30 июля 2020 года. Посадка на Марс была произведена 18 февраля 2021 года. По состоянию на 15 октября 2022 года марсоход преодолел 12 км 849,5 м.
 Мачта марсохода «Кьюриосити», на которой можно наблюдать две пары Navcam (по краям)
Мачта марсохода «Кьюриосити», на которой можно наблюдать две пары Navcam (по краям)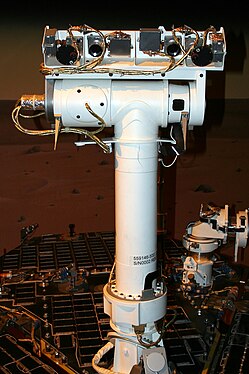 Мачта марсоходов миссии Mars Exploration Rover с двумя камерами Pancam (по краям) и двумя камерами Navcam
Мачта марсоходов миссии Mars Exploration Rover с двумя камерами Pancam (по краям) и двумя камерами Navcam Пример снимка от Navcam марсохода «Оппортьюнити»
Пример снимка от Navcam марсохода «Оппортьюнити» Первый снимок от Navcam марсохода «Кьюриосити» на Марсе
Первый снимок от Navcam марсохода «Кьюриосити» на Марсе