
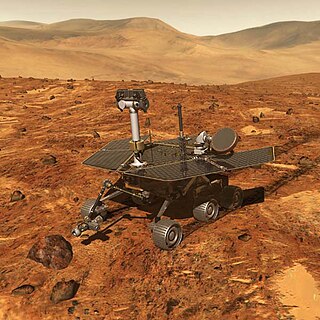
«Спи́рит», «Spirit», или «MER-A» — первый марсоход космического агентства НАСА из двух запущенных США в рамках проекта Mars Exploration Rover. Старт миссии состоялся 10 июня 2003 года. Спускаемый аппарат с марсоходом совершил мягкую посадку на Марс 4 января 2004 года за три недели до прибытия его близнеца «Оппортьюнити» (MER-B), который был успешно доставлен в другой район Марса, смещённый по долготе примерно на 180 градусов. В мае 2009 года марсоход застрял в песчаной дюне. Последняя связь с Землёй была 22 марта 2010 года.

«Марс Глобал Сервейор» — американская автоматическая межпланетная станция (АМС), один из самых успешных проектов НАСА по изучению Марса. Космический аппарат (КА) был запущен 7 ноября 1996 года с космодрома на мысе Канаверал с помощью ракеты-носителя «Дельта-2». В ходе полёта КА преодолел 750 млн км за 300 дней и 11 сентября 1997 года достиг Марса. До марта 1999 года аппарат совершал орбитальные манёвры, чтобы в итоге оказаться на круговой полярной орбите высотой 378 километров, удобной для проведения картографирования поверхности Марса.

«Бигль-2» — посадочный модуль, предназначенный для исследований в рамках миссии «Марс-экспресс» в 2003 году. Разработан британскими учёными под руководством Колина Пиллинджера для поиска следов жизни на Марсе. Назван в честь корабля «Бигль», на котором путешествовал Чарлз Дарвин.

«Марс-96» — российская автоматическая межпланетная станция, предназначенная для исследования Марса. Станция была запущена 16 ноября 1996 года с помощью ракеты-носителя «Протон». Из-за отказа разгонного блока станцию не удалось вывести на отлётную траекторию, и она разрушилась при входе в атмосферу Земли через 5 часов после запуска. Достоверно причину сбоя разгонного блока выяснить не удалось, поскольку телеметрия на этом этапе полёта не применялась.

Mars Reconnaissance Orbiter, MRO — многофункциональная автоматическая межпланетная станция (АМС) НАСА, предназначенная для исследования Марса. Аппарат построен компанией Lockheed Martin под руководством Лаборатории Реактивного Движения, на проект было потрачено 720 млн долл. Управляет аппаратом Лаборатория реактивного движения ; научной стороной миссии управляет НАСА.
Mars Surveyor 98 — программа NASA по исследованию климата и поверхности Марса.

Mars Polar Lander — космический аппарат, действовавший в рамках программы НАСА Mars Surveyor 98 по исследованию поверхности и климата Марса.

Посадочный аппарат — космический аппарат, предназначенный для мягкой посадки на поверхности астрономического объекта. После посадки аппарат продолжает работу.

Mars Sample Return Mission — предложенная межпланетная космическая экспедиция на Марс, целью которой является сбор образцов марсианского грунта и доставка его на Землю для анализа, совместный проект НАСА и ЕКА. Если экспедиция стартует в 2026 году, то на Землю образцы прибудут предположительно в 2031 году.
Планетохо́д — аппарат, предназначенный для передвижения по поверхности другой планеты, карликовой планеты, спутника. Одни планетоходы проектируются в качестве транспортных средств для перевозки членов экипажа космической экспедиции, другие как исследовательские — беспилотные, дистанционно управляемые аппараты для изучения поверхности. Планетоходы доставляются на поверхность исследуемого небесного тела посадочными модулями, которые могут являться как самостоятельными, так и отделяемыми космическими аппаратами.
«Аврора» — программа европейского космического агентства (ЕКА) для изучения Солнечной системы, в частности планеты Марс и Луны.

«ЭкзоМарс» — совместная астробиологическая программа Европейского космического агентства (ЕКА) и госкорпорации «Роскосмос» по исследованию Марса, основной целью которой был поиск жизни на Марсе или следов её существования в прошлом.
Mars Exploration Rover (MER) — программа НАСА по исследованию планеты Марс с помощью двух однотипных мобильных, передвигающихся по поверхности космических аппаратов — марсоходов. Научный руководитель программы — Стив Скваерс.

«Викинг-2» — второй из двух космических аппаратов, направленных к Марсу в рамках программы НАСА «Викинг». Как и «Викинг-1», космический аппарат «Викинг-2» состоял из орбитальной станции — искусственного спутника Марса и спускаемого аппарата с автоматической марсианской станцией.

InSight — миссия НАСА в рамках программы «Дискавери» по доставке на Марс исследовательского посадочного аппарата с сейсмометром. Миссия InSight рассчитана на изучение внутреннего строения и состава Красной планеты. Расчётный срок работы аппарата — 728 дней. Зонд создан на базе уже проверенной платформы — посадочного зонда «Феникс», который успешно работал в приполярных областях Марса. Стоимость миссии составляет около 480 млн долларов США.
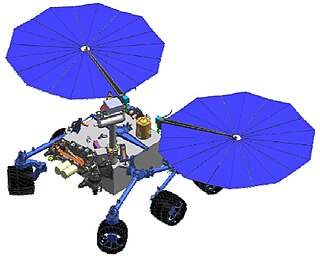
Mars Astrobiology Explorer-Cacher, MAX-C — марсоход космического агентства NASA, который должен был быть запущен к Марсу в 2018 году, и работать совместно с Европейским марсоходом программы Экзомарс. Разработка марсохода была приостановлена в апреле 2011 года из-за сокращения бюджета.

«Марсианская научная лаборатория» (МНЛ) — программа НАСА, в ходе выполнения которой на Марс успешно доставлен и эксплуатируется марсоход третьего поколения «Кьюрио́сити». Марсоход представляет собой автономную химическую лабораторию в несколько раз больше и тяжелее предыдущих марсоходов «Спирит» и «Оппортьюнити». Аппарат должен будет за несколько месяцев пройти от 5 до 20 километров и провести полноценный анализ марсианских почв и компонентов атмосферы. Для выполнения контролируемой и более точной посадки использовались вспомогательные ракетные двигатели.

«Скиапарелли» — спускаемый аппарат, разработанный Европейским космическим агентством в рамках космической программы «ЭкзоМарс». Назван в честь итальянского астронома и исследователя Марса Джованни Скиапарелли.

«Розалинд Франклин», ранее известный как «ЭкзоМарс» — планируемый марсоход, который являлся частью международной миссии «ЭкзоМарс», проводимой под эгидой Европейского космического агентства (ЕКА) и Госкорпорации «Роскосмос». Назван в честь английского биофизика Розалинды Франклин.

Navigational camera (Navcam) — тип камер, устанавливаемых на планетоходах или космических аппаратах, используемых для навигации и не мешающих научным инструментам. Навигационные камеры обычно создают широкоугольные фотографии, которые используются для планирования следующих передвижений планетохода или для отслеживания объектов.
