Rock Abrasion Tool


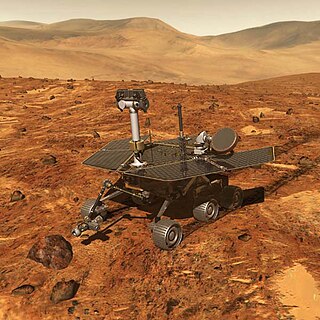
Rock Abrasion Tool (RAT) (с англ. — «Инструмент истирания камней») — шлифовально-щёточная установка двух марсоходов-близнецов космического агентства NASA — «Спирита» (MER-A) и «Оппортьюнити» (MER-B), которые совершили посадку на Марс в январе 2004 года[1]. Инструмент был спроектирован, разработан и продолжает эксплуатироваться компанией Honeybee Robotics[англ.], являющейся разработчиком специализированных роботов, автоматизированных технологий и связанных с ними систем. Экран кабелей каждого из RAT выполнен из алюминия, извлечённого из развалин Всемирного торгового центра после событий 11 сентября 2001 года[2].
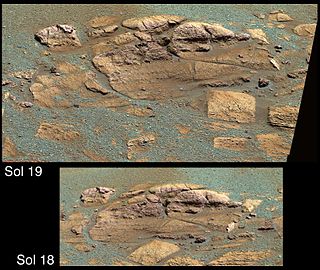
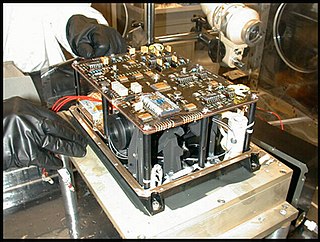
RAT стал первой научной установкой, которая получила доступ к внутренней структуре скал на другой планете. Марсианские породы не могут быть тщательно исследованы научными приборами марсоходов из-за скопившейся пыли и процессов окисления, поэтому исследуемый участок скалы вначале бурят, а затем очищают от пыли двумя металлическими щётками из нержавеющей стали[1][3]. RAT закреплён на манипуляторе марсоходов, наряду с другими научными инструментами[3][4]. RAT имеет массу 687 грамм, диаметр 7 см и длину 10 см[1][4]. RAT имеет три электродвигателя постоянного тока с рабочим напряжением 27 В и мощностью примерно 11 Вт[1][4]. Два полукруглых обода обеспечивают стабильность при бурении[3]. Инструмент состоит из трёх подвижных частей: основной вращающейся головки и смонтированных на ней шлифовального резца и вращающейся маленькой щётки[1]. Данная щётка может использоваться для очистки поверхности породы до процесса бурения. Благодаря этому горная порода может быть изучена с помощью набора инструментов до и после того, как поверхность была очищена или измельчена[1]. RAT проделывает углубление в камне путём вращения шлифовального резца с частотой примерно 3000 об/мин, центр которого смещён от центра RAT на 11,11 мм[1]. Шлифовальный резец имеет алмазное покрытие[3][4], в диаметре составляет 23,37 мм и 6,35 мм в ширину. Основная головка вращает шлифовальный резец вокруг центра RAT при очень низкой скорости — 0-1 об/мин, в конечном итоге делая один полный оборот. Сочетание высокой скорости вращения резца и низкой скорости вращения основной головки позволяет создавать круглую зону бурения диаметром 45 мм[1][3][5]. Инструмент способен войти в породу на глубину 0,5 см[1][3]. На основной вращающейся головке закреплено 4 магнита для сбора магнитных частиц пыли во время бурения[1]. Проникновение в скалу происходит медленно — для предотвращения и сведения к минимуму изменений петрологических характеристик, химического состава и минералогии пород. Было установлено, что на Марсе шлифовальный резец изнашивается в 5 раз медленнее, чем при испытаниях в земных условиях. RAT был построен в количестве 4 единиц: по одному для «Спирита» и «Оппортьюнити» и два инженерных экземпляра для проведения тестов на Земле. Показания потребляемого тока во время шлифования и температура используются для получения информации о свойствах горных пород[5]. Полный процесс бурения для плотного базальта занимает около 2 часов[5]. Средняя потребляемая мощность во время работы составляет 30 Вт.
На борту обоих марсоходов есть ещё пять научных приборов: панорамная камера (Pancam), тепловой эмиссионный спектрометр (Mini-TES) для изучения объектов на расстоянии, микрокамеру (MI), мёссбауэровский спектрометр (MIMOS II) и рентгеновский спектрометр альфа-частиц (APXS). RAT обеспечивает для них гладкую и чистую поверхность, благодаря чему они могут проводить более точные измерения.
RAT был впервые применён в полевых условиях марсоходом «Спирит» на 34-ом соле (6 февраля 2004 года) пребывания на красной планете[6]. Он был поднесён к камню Адирондак, в результате чего инструмент углубился в породу на глубину 2,85 мм в течение трёх часов. С тех пор он использовался на многочисленных марсианских породах марсоходами миссии MER.
Примечания
- ↑ 1 2 3 4 5 6 7 8 9 10 S. P. Gorevan, T. Myrick, K. Davis, J. J.Chau, P. Bartlett, S. Mukherjee. Rock Abrasion Tool: Mars Exploration Rover mission // Geophysical Research: Planets. — 2003. — 26 декабря (т. 108, № E12). Архивировано 19 октября 2021 года.
- ↑ Nikola Budanovic. After 9/11, the engineers working on the Mars Rovers decided to pay tribute by using scrap metal from the World Trade Center (англ.). The Vintage News (16 мая 2018). Дата обращения: 31 августа 2018. Архивировано 26 июля 2018 года.
- ↑ 1 2 3 4 5 6 "Hands-on" Investigation (англ.). NASA/JPL.
- ↑ 1 2 3 4 Honeybee Robotics: Rock Abrasion Tool (англ.). NASA/JPL. Архивировано 25 июля 2018 года.
- ↑ 1 2 3 Rock Abrasion Tool (RAT) (англ.). NASA/JPL. Архивировано 25 июля 2018 года.
- ↑ Mars Exploration Rover Mission: Technology (англ.). NASA/JPL. Архивировано 26 января 2019 года.
Ссылки
Программа Mars Exploration Rover | ||
|---|---|---|
| Основное |
|   |
| Марсоход «Спирит» | ||
| Марсоход «Оппортьюнити» | ||
| Инструменты | ||
| Связанное | ||

Исследование Марса космическими аппаратами | |
|---|---|
| Пролётные | |
| Орбитальные | |
| Посадочные | |
| Марсоходы | |
| Марсолёты | |
| Запланированные |
|
| Предложенные | |
| Потерянные | |
| Отменённые | |
| См. также | |