
Задача коммивояжёра — одна из самых известных задач комбинаторной оптимизации, заключающаяся в поиске самого выгодного маршрута, проходящего через указанные города хотя бы по одному разу с последующим возвратом в исходный город. В условиях задачи указываются критерий выгодности маршрута и соответствующие матрицы расстояний, стоимости и тому подобного. Как правило, указывается, что маршрут должен проходить через каждый город только один раз — в таком случае выбор осуществляется среди гамильтоновых циклов. Существует несколько частных случаев общей постановки задачи, в частности, геометрическая задача коммивояжёра, метрическая задача коммивояжёра, симметричная и асимметричная задачи коммивояжёра. Также существует обобщение задачи, так называемая обобщённая задача коммивояжёра.

R-дерево — древовидная структура данных (дерево), предложенная в 1984 году Антонином Гуттманом. Она подобна B-дереву, но используется для организации доступа к пространственным данным, то есть для индексации многомерной информации, такой, например, как географические данные с двумерными координатами. Типичным запросом с использованием R-деревьев мог бы быть такой: «Найти все музеи в пределах 2 километров от моего текущего местоположения».

Электри́ческий дипо́льный моме́нт (ЭДМ) — векторная физическая величина, характеризующая, наряду с полным зарядом, электрические свойства системы заряженных частиц. После полного заряда и положения системы, дипольный момент — главная характеристика конфигурации системы зарядов при наблюдении издали.

Диаграмма Вороного конечного множества точек S на плоскости представляет такое разбиение плоскости, при котором каждая область этого разбиения образует множество точек, более близких к одному из элементов множества S, чем к любому другому элементу множества.
2-3 дерево — структура данных, являющаяся B-деревом Степени 1, страницы которого могут содержать только 2-вершины и 3-вершины. Листовые вершины являются исключением — у них нет детей. 2-3 деревья сбалансированы, то есть, каждое левое, правое, и центральное поддерево имеет одну и ту же высоту, и, таким образом, содержат равные объемы данных.
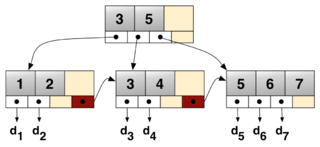
B⁺-дерево — структура данных на основе B-дерева, сбалансированное  -арное дерево поиска с переменным, но зачастую большим количеством потомков в узле. B⁺-дерево состоит из корня, внутренних узлов и листьев, корень может быть либо листом, либо узлом с двумя и более потомками.
-арное дерево поиска с переменным, но зачастую большим количеством потомков в узле. B⁺-дерево состоит из корня, внутренних узлов и листьев, корень может быть либо листом, либо узлом с двумя и более потомками.

Задача Штейнера о минимальном дереве состоит в поиске кратчайшей сети, соединяющей заданный конечный набор точек плоскости. Задача получила своё название в честь Якоба Штейнера (1796—1863).

Иерархическая кластеризация — совокупность алгоритмов упорядочивания данных, направленных на создание иерархии (дерева) вложенных кластеров. Выделяют два класса методов иерархической кластеризации:
- Агломеративные методы : новые кластеры создаются путем объединения более мелких кластеров и, таким образом, дерево создается от листьев к стволу;
- Дивизивные или дивизионные методы : новые кластеры создаются путем деления более крупных кластеров на более мелкие и, таким образом, дерево создается от ствола к листьям.

k-d-дерево — это структура данных с разбиением пространства для упорядочивания точек в k-мерном пространстве. k-d-деревья используются для некоторых приложений, таких как поиск в многомерном пространстве ключей. k-d-деревья — особый вид двоичных деревьев поиска.

Метод присоединения соседей — алгоритм биоинформатики и лингвистики, разработанный Наруя Сайтоу и Масатоси Нэи в 1987 году. Это восходящий кластерный метод для создания филогенетических деревьев. Обычно используется для деревьев, основанных на ДНК или белковых последовательностях, в лингвистике — на данных лексикостатистики, реже фоно- или морфостатистики. Для его реализации необходимо вычислить расстояния между каждой парой таксонов.
VP-дерево — разновидность BSP-дерева.

Граф ближайших соседей (ГБС) для множества P, состоящего из n объектов в метрическом пространстве — это ориентированный граф, вершинами которого служат элементы множества P, в котором существует ориентированное ребро из p в q, если q является ближайшим соседом p.
Основанная на плотности пространственная кластеризация для приложений с шумами — это алгоритм кластеризации данных, который предложили Маритин Эстер, Ганс-Петер Кригель, Ёрг Сандер и Сяовэй Су в 1996. Это алгоритм кластеризации, основанной на плотности — если дан набор точек в некотором пространстве, алгоритм группирует вместе точки, которые тесно расположены, помечая как выбросы точки, которые находятся одиноко в областях с малой плотностью . DBSCAN является одним из наиболее часто используемых алгоритмов кластеризации, и наиболее часто упоминается в научной литературе.
CURE является эффективным алгоритмом кластерного анализа для больших баз данных. По сравнению с методом k-средних алгоритм более устойчив к выбросам и способен выявить кластеры, не имеющие сферической формы и с большим разбросом размеров.
Упорядочение точек для обнаружения кластерной структуры — это алгоритм нахождения кластеров в пространственных данных на основе плотности. Алгоритм презентовали Михаэл Анкерст, Маркус М. Бройниг, Ганс-Петер Кригель и Ёрг Сандер. Основная идея алгоритма похожа на DBSCAN, но алгоритм предназначен для избавления от одной из главных слабостей алгоритма DBSCAN — проблемы обнаружения содержательных кластеров в данных, имеющих различные плотности. Чтобы это сделать, точки базы данных (линейно) упорядочиваются так, что пространственно близкие точки становятся соседними в упорядочении. Кроме того, для каждой точки запоминается специальное расстояние, представляющее плотность, которую следует принять для кластера, чтобы точки принадлежали одному кластеру. Это представлено в виде дендрограммы.

Евклидово минимальное остовное дерево — это минимальное остовное дерево набора из n точек на плоскости, где вес ребра между любой парой точек является евклидовым расстоянием между двумя точками. Простыми терминами, EMST связывает набор точек с помощью отрезков так, что общая длина всех отрезков минимальна и любая точка может быть достигнута из другой точки по этим отрезкам.

Задача о паре ближайших точек — это задача вычислительной геометрии. Дано n точек в метрическом пространстве, нужно найти пару точек с наименьшим расстоянием между ними.
Геометрический остов или t-остовной граф, или t-остов первоначально был введён как взвешенный граф на множестве точек в качестве вершин, для которого существует t-путь между любой парой вершин для фиксированного параметра t. t-путь определяется как путь в графе с весом, не превосходящим в t раз пространственное расстояние между конечными точками. Параметр t называется коэффициентом растяжения остова.
Алгоритм Форчуна — это алгоритм заметающей прямой для генерации диаграммы Вороного из набора точек на плоскости за время O с использованием памяти O(n). Алгоритм первоначально опубликовал Стивен Форчун в 1986 в своей статье «Алгоритм заметающей прямой для диаграмм Вороного».
с использованием памяти O(n). Алгоритм первоначально опубликовал Стивен Форчун в 1986 в своей статье «Алгоритм заметающей прямой для диаграмм Вороного».










