где r — радиус-вектор, конец которого описывает кривую, а параметр t направлен от какого-то начального значения a к конечному значению b. Для интеграла второго рода направление, в котором движется параметр, определяет само направление кривой При этом не играет роли, что больше — b или a.[1]
Интегрируемая функция
Пусть дана скалярная или векторная функция, от которой рассматривается интеграл вдоль кривой или
Разбиение
Разбиение отрезка параметризации
Пусть дано разбиениеотрезка (или ) то есть множество где:
если
или если
Мелкостью этого разбиения называется число обозначающее максимальное возможное из расстояний между всеми соседними значениями этого разбиения.
Введём набор промежуточных точек разбиения — точек каждая из которых лежит между и ().
Разбиение кривой
Зададим разбиениекривой которое соответствует разбиению отрезка параметризации.
За обозначим часть кривой от значения параметра до значения где
Зададим набор промежуточных точек разбиения кривой — точек каждая из которых лежит на ().
Интегральные суммы
Ниже для определения интегральных сумм используются промежуточные точки разбиение и участки кривой Рассмотрим две интегральные суммы:
Если в интегральных суммах n неограниченно увеличить так, чтобы мелкость стремилась к нулю, то в пределе получится криволинейный интеграл от функции () по кривой Если этот предел действительно существует, то говорят, что функция () интегрируема по кривой Тогда интегралы первого и второго рода обозначаются:
где dr — вектор-дифференциал вдоль кривой. В случае с интегралом второго рода важно направление кривой: от этого зависит направление самого дифференциала dr.
Если кривая замкнута (начало совпадает с концом), то вместо значка принято писать
Криволинейный интеграл первого рода
Иллюстрация криволинейного интеграла первого рода на скалярном поле
Свойства
Линейность:
Аддитивность: если и пересекаются в одной точке, то
Монотонность: если на , то
Теорема о среднем: при непрерывности функции на для интеграла возможно подобрать такую точку что
или, что то же самое,
Изменение направления обхода кривой интегрирования не влияет на знак интеграла:
Криволинейный интеграл первого рода не зависит от параметризации кривой.
Вычисление
Пусть — гладкая, спрямляемая (конечной длины) кривая, заданная параметрически (как в определении). Пусть функция определена и интегрируема вдоль кривой Тогда в общем случае
Иллюстрация криволинейного интеграла второго рода на векторном поле
Свойства
1. Линейность:
2. Аддитивность:
3.
Замечание. Для криволинейных интегралов второго рода несправедливы свойство монотонности, оценка модуля и теорема о среднем.
Вычисление
Пусть AB — гладкая кривая, заданная параметрически (как в определении) и наделённая направлением от A до B. Пусть функция определена и интегрируема вдоль кривой Тогда
а при изменении обхода кривой:
Взаимосвязь криволинейных интегралов
Если обозначить за единичный вектор касательной к кривой который имеет то же направление, в каком параметризирована сама кривая, то взаимосвязь между криволинейными интегралами такова:
В терминах самих интегралов это выглядит так:
где — гладкая, спрямляемая кривая, наделённая направлением, а вектор-функция интегрируема на ней.
В трёхмерном евклидовом пространстве дифференциалы координат вектора, направленного вдоль направленной кривой, выражаются через направляющие косинусы, если воспользоваться определением скалярного произведения:
Тогда, раскладывая скалярное произведение в по координатам, взаимосвязь криволинейных интегралов можно выразить так:
Механические приложения
Работа A по перемещению материальной точки вдоль направленной кривой l под воздействием силыF представляет собой
Массаm криволинейного (бесконечно тонкого) тела l, линейная плотность которого вдоль кривой l равна μ(r), выражается интегралом
Центр масс (центра тяжести) криволинейного тела l с линейной плотностью μ(r) выражается через радиус-вектор rc как
где m — масса кривой l.
Моменты инерции кривой l при её вращении вокруг координатных осей в 3-мерном пространстве:
Сила притяжения точечной массы m0 в начале координат с криволинейным телом l равна
Интерфере́нция све́та — интерференция электромагнитных волн — перераспределение интенсивности света в результате наложения (суперпозиции) нескольких световых волн. Это явление обычно характеризуется чередующимися в пространстве максимумами и минимумами интенсивности света. Конкретный вид такого распределения интенсивности света в пространстве или на экране, куда падает свет, называется интерференционной картиной.
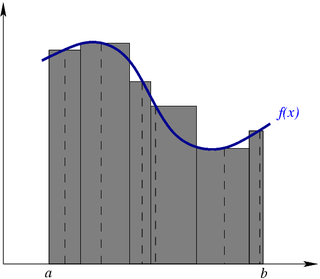
Интегра́л Ри́мана — наиболее широко используемый вид определённого интеграла. Очень часто под термином «определённый интеграл» понимается именно интеграл Римана, и он изучается самым первым из всех определённых интегралов во всех курсах математического анализа. Введён Бернхардом Риманом в 1854 году, и является одной из первых формализаций понятия интеграла.
Ве́кторное по́ле — это отображение, которое каждой точке рассматриваемого пространства ставит в соответствие вектор с началом в этой точке. Например, вектор скорости ветра в данный момент времени различен в разных точках и может быть описан векторным полем.
Механи́ческая рабо́та — физическая величина — скалярная количественная мера действия силы на тело или сил на систему тел. Зависит от численной величины и направления силы (сил) и от перемещения тела.
Теоре́ма Нётер или первая теорема Нётер утверждает, что каждой дифференцируемой симметрии действия для физической системы с консервативными силами соответствует закон сохранения. Теорема была доказана математиком Эмми Нётер в 1915 году и опубликована в 1918 году. Действие для физической системы представляет собой интеграл по времени функции Лагранжа, из которого можно определить поведение системы согласно принципу наименьшего действия. Эта теорема применима только к непрерывным и гладким симметриям над физическим пространством.
Эффект Шубникова — де Хааза назван в честь советского физика Л. В. Шубникова и нидерландского физика В. де Хааза, открывших его в 1930 году. Наблюдаемый эффект заключался в осцилляциях магнетосопротивления плёнок висмута при низких температурах. Позже эффект Шубникова — де Гааза наблюдали в многих других металлах и полупроводниках. Эффект Шубникова — де Гааза используется для определения тензора эффективной массы и формы поверхности Ферми в металлах и полупроводниках.
Ко́мпле́ксный ана́лиз, тео́рия фу́нкций ко́мпле́ксного переме́нного — раздел математического анализа, в котором рассматриваются и изучаются функции комплексного аргумента.
Преобразование Радона — интегральное преобразование функции многих переменных, родственное преобразованию Фурье. Впервые введено в работе австрийского математика Иоганна Радона 1917-го года.
Дифференциа́льная геоме́трия кривы́х — раздел дифференциальной геометрии, который занимается исследованием гладких пространственных и плоских кривых в евклидовом пространстве аналитическими методами.
Лагранжиа́н, фу́нкция Лагра́нжа динамической системы, является функцией обобщённых координат и описывает развитие системы. Например, уравнения движения в этом подходе получаются из принципа наименьшего действия, записываемого как
Преобразова́ние Лапла́са (ℒ) — интегральное преобразование, связывающее функцию комплексного переменного (изображение) с функцией вещественного переменного (оригинал). С его помощью исследуются свойства динамических систем и решаются дифференциальные и интегральные уравнения.
Метод Лагранжа — метод для получения общего решения неоднородного уравнения, зная общее решение однородного уравнения, без нахождения частного решения.
Вириал для множества точечных частиц в механике определяется как:
Волновое уравнение в физике — линейное гиперболическое дифференциальное уравнение в частных производных, задающее малые поперечные колебания тонкой мембраны или струны, а также другие колебательные процессы в сплошных средах и электромагнетизме (электродинамике). Находит применение и в других областях теоретической физики, например при описании гравитационных волн. Является одним из основных уравнений математической физики.
Действие в физике — скалярная физическая величина, являющаяся мерой движения физической системы. Действие является математическим функционалом, который берёт в качестве аргумента траекторию движения физической системы и возвращает в качестве результата вещественное число.
Центростреми́тельное (норма́льное) ускоре́ние — составляющая ускорения тела, характеризующая быстроту изменения направления вектора скорости. Направлено к центру кривизны траектории, с чем и связан термин. Обозначается символом, выбранным для ускорения, с добавлением значка «нормальное»: ; в системе СИ измеряется в м/с2.
Тангенциа́льное ускоре́ние — компонента ускорения, направленная по касательной к траектории движения. Характеризует изменение модуля скорости, в отличие от нормальной компоненты, характеризующей изменение направления скорости.
Теорема о циркуляции магнитного поля — одна из фундаментальных теорем классической электродинамики, сформулированная Андре Мари Ампером в 1826 году. В 1861 году Джеймс Максвелл снова вывел эту теорему, опираясь на аналогии с гидродинамикой, и обобщил её. Уравнение, представляющее собой содержание теоремы в этом обобщённом виде, входит в число уравнений Максвелла.. Теорема гласит:
Линейные динамические системы — это динамические системы, эволюция которых во времени описывается линейным дифференциальным уравнением. В то время как динамические системы в целом не имеют замкнутой формы решения, линейные динамические системы могут быть решены точно, и у них есть большой набор математических свойств. Линейные системы также могут быть использованы для понимания поведения общих динамических систем, путём расчета точек равновесия системы и приближения её в виде линейной системы вокруг каждой такой точки.
Динамика точки — раздел динамики, изучающий причины изменения движения материальных точек, то есть тел, характерными размерами которых на масштабах размеров задачи можно пренебречь.
Эта страница основана на статье Википедии. Текст доступен на условиях лицензии CC BY-SA 4.0; могут применяться дополнительные условия. Изображения, видео и звуки доступны по их собственным лицензиям.






![{\displaystyle [a,b]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935)
![{\displaystyle [b,a]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3015146003c7dab01d939e34e07159fa9604bc3)