Щётки стеклоочистителя автобусаПодъёмник на основе параллелограммных механизмов — хорошо видны два внизу и один вверху
Параллелограмм с неподвижным звеном — одно звено неподвижно, противоположное совершает качательное движение, оставаясь параллельным неподвижному. Два параллелограмма, соединённых друг за другом, дают конечному звену две степени свободы, оставляя его параллельным неподвижному. Примеры: стеклоочистители автобусов, погрузчики, штативы, подвесы, автомобильные подвески.
Параллелограмм с неподвижным шарниром — используется свойство параллелограмма сохранять постоянное соотношение расстояний между тремя точками. Пример: чертёжный пантограф — прибор для масштабирования чертежей.
Ромб — все звенья одинаковой длины, приближение (стягивание) пары противоположных шарниров приводит к раздвиганию двух других шарниров. Все звенья работают на сжатие. Недостаток схемы — значительное изменение соотношения сил при движении механизма. Примеры — автомобильный ромбовидный домкрат, трамвайный пантограф.
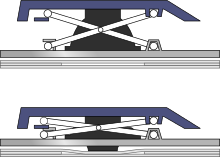
Ножничный подъёмникНожничный механизмНожничный механизм ноутбучных клавиатур
Ножничный или X-образный механизм, также известный как Нюрнбергские ножницы[1] — вырожденный параллелограмм, вариант ромба — два звена, соединённые посередине шарниром. Достоинства механизма — компактность и простота, недостаток — наличие двух пар скольжения. Два (и более) таких механизма, соединённые последовательно, образуют в середине ромб(ы). Применяется в подъёмниках, детских игрушках.
Откидное кресло, в котором при переводе сидения в горизонтальное положение механизм переводит в то же положение и подлокотники, а спинку отодвигает немного назад.
Примечания
↑Рем Уланов.Танк в упряжке(рус.). — «В средние века с помощью так называемых нюренбергских ножниц - складных переносных лестниц - штурмовали крепостные стены.» Дата обращения: 15 февраля 2013. Архивировано из оригинала 7 апреля 2013 года.
Штати́в, трипод, тренога — передвижная опора для оптических приборов, осветительного оборудования и некоторых типов оружия, которая служит для точного наведения и удержания тяжёлых устройств. Наибольшее распространение получили в кинематографе, телевидении и фотографии. Также используются для установки теодолитов, зрительных труб и телескопов.
Механи́зм — внутреннее устройство машины, прибора, аппарата, приводящее их в действие. Механизм представляет собою замкнутую последовательность сочленённых звеньев, где как минимум одно из них (ведущее) служит для приложения работы, и как минимум одно (ведомое) — для получения полезной работы.
Дифференциа́л — механизм передачи мощности вращением, позволяющий без пробуксовок и потерь КПД складывать два независимых по своим угловым скоростям входящих потока мощности в один исходящий, раскладывать один входящий поток мощности на два взаимозависимых по своим угловым скоростям исходящих, а также работать в первом и втором вариантах попеременно. Основное назначение дифференциала в технике — трансмиссии транспортных машин, в которых дифференциал разветвляет поток мощности от двигателя на два между колёсами, осями, гусеницами, воздушными и водными винтами. Прочее использование дифференциалов в технике вообще и в транспортной технике в частности является вторичным и нечастым. Механической основой дифференциала по умолчанию является планетарная передача как единственная из всех передач вращательного движения, имеющая две степени свободы.
Панто́граф — токоприёмник с подъёмным механизмом в виде шарнирного многозвенника, обеспечивающего вертикальное перемещение контактного полоза.
Простейший механизм — механическое устройство, изменяющее направление или величину силы. В общем, их можно определить как простейшие инструменты, которые используют механический выигрыш для увеличения силы. Обычно этот термин относится к шести классическим простейшим механизмам, которые были найдены учеными эпохи Возрождения:
Рычаг
Колесо и ось
Блок
Наклонная плоскость
Клин
Винт
Поступа́тельное движе́ние — механическое движение системы точек, при котором отрезок, связывающий любые две точки этого тела, форма и размеры которого во время движения не меняются, остаётся параллельным своему положению в любой предыдущий момент времени. При поступательном движении все точки тела описывают одну и ту же траекторию и в любой данный момент времени имеют одинаковые по направлению и абсолютной величине векторы скорости и ускорения, которые меняются синхронно для всех точек тела.
Гидротрансформа́тор — гидравлическое устройство, служащее для преобразования (изменения) крутящего момента от двигателя к трансмиссии. В отличие от гидромуфты гидротрансформатор способен увеличивать момент на ведомом валу в зависимости от действующего на него сопротивления.
Нару́чники — устройство в виде двух закрывающихся на ключ металлических браслетов, как правило соединённых между собой небольшой цепочкой. Используется, как правило, силовыми структурами государства либо выполняющими аналогичные функции негосударственными организациями для ограничения свободы действий человека посредством сковывания его рук. Поэтому подвергшийся применению устройства часто называется закованным [в наручники].
Ку́льман — чертёжный прибор пантографной системы в виде доски, установленной вертикально или под углом. Согласно имеющимся сведениям, автором одноимённого чертёжного прибора и основателем одноимённой фирмы является Франц Кульман.
Мёртвый ход.
Кривоши́п — звено кривошипно-шатунного механизма, совершающее циклическое вращательное движение на полный оборот вокруг неподвижной оси. Используется для преобразования кругового движения в возвратно-поступательное и наоборот. Как правило, выступает в роли ведущего звена рычажных и зубчато-рычажных механизмов. Переход от коренной шейки к шатунной, который и образует кривошип, также может называться «щека».
Панто́граф — прибор, служащий для перечерчивания планов, карт и т. п. в другом, обычно более мелком масштабе.
Гре́йфер — грузозахватное приспособление грузоподъёмных кранов, погрузчиков и монорельсовых тележек для сыпучих материалов, скрапа и стружки, крупнокусковых каменных и волокнистых материалов, а также длинномерных лесоматериалов.
План скоросте́й — диаграмма, на которой векторы скоростей точек абсолютно твёрдого тела или некоторого механизма отложены из одной точки в выбранном масштабе.
Четырёхзве́нный механи́зм — простейший кинематически замкнутый механизм, звенья которого способны двигаться друг относительно друга. Этот механизм состоит из четырёх звеньев, каждое из которых соединено подвижными соединениями с двумя другими.
Механизм параллельного движения — механизм, изобретённый шотландским инженером Джеймсом Уаттом в 1784 году для его парового двигателя двойного действия.
Сте́пени свобо́ды в механике — совокупность независимых координат перемещения и/или вращения, полностью определяющая положение системы или тела.
Теория машин и механизмов (ТММ) — это научная дисциплина об общих методах исследования, построения, кинематики и динамики механизмов и машин и о научных основах их проектирования.
Шарни́рный четырёхзве́нник — плоский механизм из четырёх звеньев, соединенных между собой вращательными кинематическими парами. Одно из этих звеньев в теории механизмов и машин принимают за стойку, т. е. неподвижное звено.
Ножничный механизм использует соединенные складные опоры в виде перекрестного соединения, известного под названием «пантограф».
Эта страница основана на статье Википедии. Текст доступен на условиях лицензии CC BY-SA 4.0; могут применяться дополнительные условия. Изображения, видео и звуки доступны по их собственным лицензиям.