Безре́льсовый тра́нспорт — общее название всех сухопутных видов транспорта, не использующих рельсовый путь. Для движения безрельсовых видов транспорта достаточно любой ровной твёрдой поверхности. При регулярном движении дороги образуются сами собой, тем не менее, в большинстве случаев их приходится строить специально и покрывать слоем асфальтобетона или другого подходящего материала. Дороги без твёрдого покрытия сильно пылят в сухую погоду, а во время дождей и особенно весеннего таяния снегов раскисают.

Ро́бот — автоматическое устройство, предназначенное для осуществления различного рода механических операций, которое действует по заранее заложенной программе.
Робототе́хника — прикладная наука, занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой развития производства.

Манипуля́тор — механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов. Это значение закрепилось за словом с середины XX века, благодаря применению сложных механизмов для манипулирования опасными объектами в атомной промышленности. Используется для перемещения различных грузов, получил широкое развитие в современном обществе.
Поточное производство — прогрессивный способ организации производства, характеризующийся расчленением производственного процесса на отдельные, относительно короткие операции, выполняемые на специально оборудованных, последовательно расположенных рабочих местах — поточных линиях.
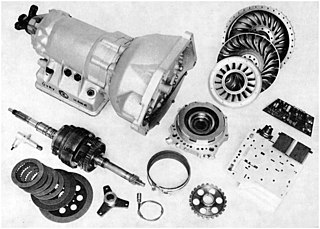
Автоматическая коробка передач в широком смысле — коробка передач, устройство и механика работы которой позволяют ей в процессе движения транспортного средства самостоятельно определять наиболее подходящее доступное передаточное отношение, переходить (переключаться) с одного передаточного отношения на другое, обеспечивать упрощённую для водителя процедуру трогания с места автоматически, наиболее оптимально подстраивая внешнюю скоростную характеристику двигателя под заданную водителем скорость движения в текущих дорожных условиях. АКП есть один из двух широко распространённых типов коробок передач, применяемых на разноплановых колёсных, гусеничных и рельсовых транспортных средствах.

Промы́шленный ро́бот — предназначенный для выполнения двигательных и управляющих функций в производственном процессе манипуляционный робот, то есть автоматическое устройство, состоящее из манипулятора и перепрограммируемого устройства управления, которое формирует управляющие воздействия, задающие требуемые движения исполнительных органов манипулятора. Применяется для перемещения предметов производства и выполнения различных технологических операций.

Листогиб или листогибочный пресс — устройство для холодной гибки листового металла.

Пожарный робот — мобильный, стационарный робот, который предназначен для тушения пожара.

Маши́на — техническое устройство, выполняющее механические движения для преобразования энергии, материалов и информации.

Автома́тика — отрасль науки и техники, которая разрабатывает технические средства и методы для осуществления технологических процессов без непосредственного участия человека.
Автоматиза́ция произво́дства — это процесс в развитии машинного производства, при котором функции управления и контроля, ранее выполнявшиеся человеком, передаются приборам и автоматическим устройствам. Введение автоматизации на производстве позволяет значительно повысить производительность труда, обеспечить стабильное качество выпускаемой продукции, сократить долю рабочих, занятых в различных сферах производства.

Аптечный робот — робот, который устанавливается в аптеке для оптимизации хранения, поиска и выдачи медикаментов непосредственно к рабочему месту фармацевта.
Киберфизи́ческая систе́ма — информационно-технологическая концепция, подразумевающая интеграцию вычислительных ресурсов в физические сущности любого вида, включая биологические и рукотворные объекты. В киберфизических системах вычислительная компонента распределена по всей физической системе, которая является её носителем, и синергетически увязана с её составляющими элементами.

Сва́рка ро́ботами или роботизи́рованная сва́рка — сварка с использованием роботов, которые обеспечивают автоматизацию как самого процесса сварки, так и работ по перемещению и обработке деталей и изделий. Газовая дуговая сварка металлическим электродом часто автоматизирована, но для работы робота оператор готовит материалы, программирует его работу. Роботизированная сварка обычно используется для контактной точечной сварки и дуговой сварки в автомобильной промышленности.

Коллаборативный робот (кобот) — это автоматическое устройство, которое может работать совместно с человеком для создания или производства различных продуктов. Как и промышленные роботы, коботы состоят из манипулятора и перепрограммируемого устройства управления, которое формирует управляющие воздействия, задающие требуемые движения исполнительных органов манипулятора.

Гибкая производственная система — производственная система, в которой существует определенная гибкость, которая позволяет системе реагировать в случае изменений номенклатуры продукции или технологии, независимо от того, были ли они предсказаны или непредсказуемы.

SCARA - это кинематика, основанная на рычажной системе, обеспечивающей перемещение конечного звена в плоскости за счет вращательного привода рычагов механизма. Классический SCARA механизм состоит из двух рычагов, соединенных в одной точке, и 2-х независимых приводов, один из которых установлен в сочленении 2-х рычагов и вращает их друг относительно друга, а второй установлен в основании первого рычага и вращает его относительно рабочей плоскости.
Комплексное автоматизированное производство - это подход к построению производства с использованием компьютеров, управляющих всеми производственными процессами. Такая интеграция позволяет обмениваться информацией о состояниях отдельных процессов и инициировать управляющее воздействие. Внедрение компьютерных технологий позволяет ускорить производство и снизить процент ошибок, однако основным преимуществом является возможность создания автоматизированных производственных процессов. Обычно CIM относится к процессам управления с обратной связью, основанных на данных, поступающих от различных датчиков в режиме реального времени.
Робототехнический комплекс — различный вид станочных систем, имеющий одно или более технологическое оборудование в своем составе при наличии в нём промышленных роботов.