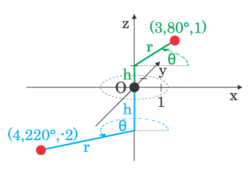
Цилиндрической системой координат называют трёхмерную систему координат, являющуюся расширением полярной системы координат путём добавления третьей координаты (обычно обозначаемой ), которая задаёт высоту точки над плоскостью.
— расстояние от до , ортогональной проекции точки на плоскость . Или то же самое, что расстояние от до оси .
— угол между осью и отрезком .
равна аппликате точки .
При использовании в физических науках и технике международный стандарт ISO 31-11 рекомендует использовать обозначения .
Цилиндрические координаты удобны при анализе поверхностей, симметричных относительно какой-либо оси, если ось взять в качестве оси симметрии. Например, бесконечно длинный круглый цилиндр (цилиндрическая поверхность) в прямоугольных координатах имеет уравнение , а в цилиндрических — очень простое уравнение . Отсюда и идёт для данной системы координат имя «цилиндрическая».
Поскольку цилиндрическая система координат — только одна из многих трёхмерных систем координат, существуют законы преобразования координат между цилиндрической системой координат и другими системами.
Кинема́тика точки — раздел кинематики, изучающий математическое описание движения материальных точек. Основной задачей кинематики является описание движения при помощи математического аппарата без выяснения причин, вызывающих это движение.
Лемниска́та Берну́лли — плоская алгебраическая кривая. Определяется как геометрическое место точек, произведение расстояний от которых до двух заданных точек (фокусов) постоянно и равно квадрату половины расстояния между фокусами.
Поляриза́ция волн — характеристика поперечных волн, описывающая поведение вектора колеблющейся величины в плоскости, перпендикулярной направлению распространения волны. В плоском пространстве определяет работу для вектора колеблющейся величины, который перпендикулярен направлению распространения волны.
Градие́нт — вектор, своим направлением указывающий направление наискорейшего роста некоторой скалярной величины .
Систе́ма координа́т — комплекс определений, реализующий метод координат, то есть способ определять положение и перемещение точки или тела с помощью чисел или других символов. Совокупность чисел, определяющих положение конкретной точки, называется координатами этой точки.
Класс трёхмерных параметрических поверхностей определяется функцией , зависящей от параметров и отображающей некоторое связное множество из n-мерного пространства в трёхмерное пространство таким образом, что это отображение является поверхностью. Эта функция задаёт класс поверхностей, а набор параметров — конкретную поверхность из этого класса.
Фу́нкция Гри́на — функция, используемая для решения линейных неоднородных дифференциальных уравнений с граничными условиями . Названа в честь английского математика Джорджа Грина, который первым развил соответствующую теорию в 1830-е годы.
Лагранжиа́н, фу́нкция Лагра́нжа динамической системы, является функцией обобщённых координат и описывает развитие системы. Например, уравнения движения в этом подходе получаются из принципа наименьшего действия, записываемого как
Пряма́я — одно из фундаментальных понятий евклидовой геометрии. При систематическом изложении геометрии прямые линии обычно принимаются за одно из исходных (неопределяемых) понятий, их свойства и связь с другими понятиями определяются аксиомами геометрии.
Ма́трицей поворо́та называется ортогональная матрица, которая используется для выполнения собственного ортогонального преобразования в евклидовом пространстве. При умножении любого вектора на матрицу поворота длина вектора сохраняется. Определитель матрицы поворота равен единице.
Поля́рная систе́ма координа́т — система координат на плоскости, определяющаяся двумя полярными координатами и , которые связаны с декартовыми прямоугольными координатами и следующими выражениями:
Сферическая система координат — трёхмерная система координат, в которой каждая точка пространства определяется тремя числами , где — расстояние до начала координат, а и — зенитный и азимутальный углы соответственно.
Кинема́тика твёрдого тела — раздел кинематики, изучающий движение абсолютно твёрдого тела, не вдаваясь в вызывающие его причины. В силу относительности движения, обязательно указание системы отсчёта, относительно которой описывается движение.
Волновое уравнение в физике — линейное гиперболическое дифференциальное уравнение в частных производных, задающее малые поперечные колебания тонкой мембраны или струны, а также другие колебательные процессы в сплошных средах и электромагнетизме (электродинамике). Находит применение и в других областях теоретической физики, например при описании гравитационных волн. Является одним из основных уравнений математической физики.
Интегра́л Пуассо́на — общее название математических формул, выражающих решение краевой задачи или начальной задачи для уравнений с частными производными некоторых типов.
Бетатронные колебания — быстрые поперечные колебания, совершаемые частицей в фокусирующих магнитных полях ускорителя. Бетатронные колебания — основной предмет изучения электронной оптики, раздела физики ускорителей.
Тороидальная система координат — ортогональная система координат в пространстве, координатными поверхностями которой являются торы, сферы и полуплоскости. Данная система координат может быть получена посредством вращения двумерной биполярной системы координат вокруг оси, равноудалённой от фокусов биполярной системы.
Векторными сферическими гармониками являются векторные функции, преобразующиеся при вращениях системы координат так же, как скалярные сферические функции с теми же индексами, или определенные линейные комбинации таких функций.
Диполя́рная, или дипо́льная, систе́ма координа́т — трёхмерная криволинейная ортогональная система координат, основанная на точечном (центральном) диполе, точнее, на его инвариантах преобразования координат.
Элеме́нт длины́ — понятие математического анализа и дифференциальной геометрии, точнее — интегрального исчисления, элемент интегрирования, главная линейная часть приращения длины кривой, то есть малый отрезок касательной к кривой в рассматриваемой точке. Синонимы: дифференциал длины дуги, дифференциал дуги, элемент дуги, линейный элемент.
Эта страница основана на статье Википедии. Текст доступен на условиях лицензии CC BY-SA 4.0; могут применяться дополнительные условия. Изображения, видео и звуки доступны по их собственным лицензиям.